Les motoréducteurs sont la pierre angulaire des systèmes de mouvement modernes. Ils associent un moteur électrique et un réducteur au sein d’une unité compacte et performante. Le rapport de démultiplication est essentiel à la performance globale du système. Qu’il s’agisse d’alimenter des robots, des convoyeurs à bande, des dispositifs médicaux ou l’automatisation industrielle, comprendre l’impact des rapports de démultiplication sur la vitesse et le couple est essentiel pour choisir le motoréducteur adapté à chaque application.
Qu’est-ce qu’un rapport de démultiplication ?
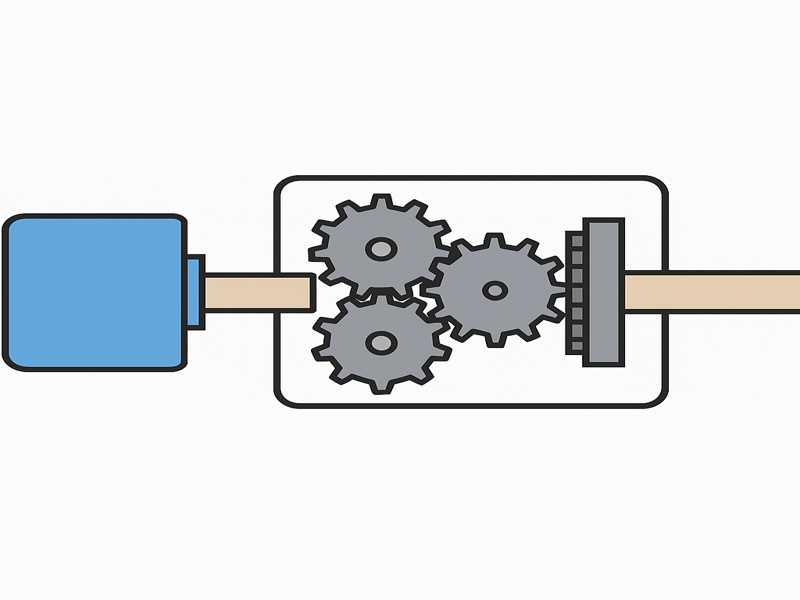
Dans un système de moteur à engrenages, la relation entre les engrenages d’entrée et de sortie détermine le rapport de démultiplication, qui à son tour détermine la manière dont la vitesse et le couple sont transformés.
Formule:
Rapport de démultiplication = nombre de dents sur l’engrenage de sortie / nombre de dents sur l’engrenage d’entrée
Alternativement, pour les motoréducteurs :
Rapport de démultiplication = Vitesse d’entrée (tr/min du moteur) / Vitesse de sortie (tr/min de la boîte de vitesses)
Exemple:
Si le moteur tourne à 3000 tr/min, l’arbre de sortie de la boîte de vitesses tourne à 100 tr/min, le rapport de démultiplication est :
3000/100=30:1
Impact des rapports de démultiplication sur la vitesse et le couple
Le rôle principal des rapports de démultiplication est de convertir la vitesse en couple, ou inversement. Dans les moteurs à engrenages, cette transformation est essentielle pour répondre aux besoins mécaniques des différentes applications.
| Type de rapport de démultiplication | Changement de vitesse | Changement de couple | Exemple d’application |
| Rapport élevé (ex. 100:1) | Vitesse de sortie fortement réduite | Couple fortement augmenté | Équipements de levage, convoyeurs |
| Faible rapport (ex. 5:1) | Vitesse de sortie légèrement réduite | Couple légèrement augmenté | Robotique, ventilateurs, pompes |
| Rapport 1:1 | Aucun changement | Aucun changement | Systèmes à entraînement direct |
Effets clés :
Rapports de démultiplication plus élevés = vitesse plus faible, couple plus élevé
Rapports de démultiplication inférieurs = vitesse plus élevée, couple plus faible
Cette relation est inversement proportionnelle : augmenter l’un réduit l’autre.
Explication du compromis couple-vitesse
Les moteurs à engrenages obéissent au principe de conservation de la puissance, déduction faite des pertes mécaniques. Si un moteur produit une certaine puissance (P), alors :
P = Couple × Vitesse angulaire
Si la vitesse (vitesse angulaire) est réduite par une boîte de vitesses, le couple doit augmenter, en supposant une puissance constante (et en ignorant les pertes).
Formule de gain de couple :
Couple de sortie = Couple moteur × Rapport de démultiplication × Rendement
Facteur d’efficacité :
Les boîtes de vitesses ne sont pas efficaces à 100 %. Leur rendement varie généralement de :
- Engrenages droits : 95–98 %
- Engrenages planétaires : 90–95 %
- Engrenages à vis sans fin : 70–90 %
Types de boîtes de vitesses et leurs rapports
Boîte de vitesses à engrenages droits
- Conception simple, facile à fabriquer
- Utilisé dans les applications à faible vitesse et à faible couple
- Rapports de démultiplication : 1:1 à 12:1 généralement
Réducteur planétaire
- Densité de couple élevée
- Taille compacte
- Ratios : 3:1 à 100:1+
Réducteur à vis sans fin
- Rapports élevés en une seule étape (jusqu’à 100:1)
- Capacité d’autoblocage
- Efficacité réduite en raison du contact glissant
Choisir le bon rapport de démultiplication
Lors du choix d’un motoréducteur, la sélection du rapport de démultiplication approprié est cruciale pour garantir que le moteur :
- Fonctionne à la vitesse et au couple souhaités
- Évite la surchauffe ou le calage
- Correspond aux exigences de charge
Considérations pratiques :
- Exigence de couple de charge : calculez le couple dont votre application a besoin.
- Couple moteur : assurez-vous que le moteur fournit un couple suffisant, en tenant compte du rapport de démultiplication et des pertes d’efficacité.
- Exigence de vitesse : choisissez un rapport qui ramène le régime du moteur au régime cible.
- Cycle de service : pour une utilisation continue, privilégiez la gestion thermique.
Exemples concrets
Illustrons la relation entre le rapport de démultiplication, la vitesse et le couple à l’aide d’exemples.
Exemple 1 : Système de convoyeur
| Spécification | Valeur |
| Vitesse du moteur | 3000 tr/min |
| Vitesse requise de la courroie | 100 tr/min |
| Couple requis de la charge | 10 Nm |
| Rendement du réducteur | 90 % |
Étape 1 : Calculer le rapport de démultiplication requis
Rapport de démultiplication = 3000/100 = 30:1
Étape 2 : Calculer le couple moteur
- Couple moteur = 10 Nm/30 × 0,9 = 0,37 Nm
- Ainsi, un moteur avec un couple d’au moins 0,4 Nm et une boîte de vitesses 30:1 peuvent entraîner le système.
Rapports de démultiplication courants et leurs applications
| Rapport de réduction | Vitesse de sortie (si moteur = 3000 tr/min) | Gain de couple | Application typique |
| 5:1 | 600 tr/min | 5× | Petites pompes, ventilateurs |
| 10:1 | 300 tr/min | 10× | Convoyeurs légers |
| 30:1 | 100 tr/min | 30× | Machines d’emballage |
| 60:1 | 50 tr/min | 60× | Plateformes élévatrices |
| 100:1 | 30 tr/min | 100× | Actionneurs industriels lourds |
Calcul des paramètres de sortie
Lorsqu’on dispose d’un moteur et d’un rapport de démultiplication, vous pouvez déterminer le couple de sortie et la vitesse en utilisant :
Vitesse de sortie = vitesse du moteur/rapport de démultiplication
Couple de sortie = Couple moteur × Rapport de démultiplication × Rendement
Exemple de tableau :
| Couple moteur (Nm) | Rapport de réduction | Rendement (%) | Couple de sortie (Nm) |
| 0,5 | 10:1 | 95 % | 4,75 |
| 0,5 | 20:1 | 90 % | 9,00 |
| 0,5 | 50:1 | 85 % | 21,25 |
Lorsque le rapport de démultiplication est incorrect
Une sélection de vitesse incorrecte peut entraîner :
- Survitesse : Couple insuffisant, risque de calage
- Sur-couple : contrainte excessive sur les pièces mécaniques
- Accumulation de chaleur : transfert de puissance inefficace
- Instabilité du système : oscillations dans les systèmes de contrôle précis
Pour éviter ces problèmes :
- Toujours calculer la marge de couple
- Consultez les courbes du moteur et les valeurs nominales des réducteurs
- Tenir compte de l’inertie et de la variation de charge
Conseils pour l’optimisation du rapport de démultiplication
- Commencez par les exigences de charge : les exigences de vitesse et de couple définissent votre choix de motoréducteur.
- Évitez le sur-démultiplication : les rapports de démultiplication élevés réduisent trop la vitesse et augmentent la taille du système.
- Tenez compte du jeu : les boîtes de vitesses à rapport élevé peuvent introduire du jeu, ce qui est essentiel pour les tâches de précision.
- Inclure une marge de sécurité : ajoutez 20 à 30 % aux exigences de couple pour les conditions réelles.
- Test sous charge : simulez les conditions réelles pour garantir que le moteur à engrenages fonctionne de manière fiable.
Les rapports de démultiplication sont essentiels aux performances d’un motoréducteur. Ils influencent directement la puissance délivrée par le moteur : en réduisant la vitesse pour augmenter le couple, ou inversement. Choisir le bon rapport garantit que votre motoréducteur répond aux exigences de votre application de manière efficace, fiable et sûre.
En tant que fabricant de motoréducteurs, nous proposons des rapports de réduction personnalisables pour répondre à vos besoins spécifiques de vitesse et de couple. Notre équipe d’ingénieurs peut vous aider à sélectionner ou à concevoir des motoréducteurs qui optimisent les performances de votre système tout en maximisant l’efficacité énergétique et la longévité.
Que vous automatisiez des lignes de production ou que vous conceviez des robots de précision, la compréhension des rapports de démultiplication permet de prendre des décisions plus intelligentes qui font avancer vos projets.