Les moteurs BLDC (moteurs à courant continu sans balais) de type outrunner sont largement utilisés dans les drones, les avions radiocommandés, la robotique de loisir et les vélos électriques grâce à leur rapport couple/poids élevé et leur rendement. Un composant essentiel de tout système utilisant des moteurs BLDC est le contrôleur de vitesse électronique (ESC) : il assure l’interface entre les signaux de commande (tels que la modulation de largeur d’impulsion [PWM] ou d’autres protocoles) et la puissance fournie au moteur.
Choisir le bon contrôleur de vitesse électronique (ESC) implique de comprendre son fonctionnement, les modes de contrôle qu’il prend en charge (PWM ou FOC), ses valeurs nominales de tension et de courant, ainsi que d’autres fonctionnalités comme la télémétrie, le refroidissement et le firmware. Ce guide vous permettra d’en apprendre davantage sur :
- Principes de fonctionnement de l’ESC
- Méthodes de contrôle : PWM vs FOC
- Considérations relatives à la tension
- Valeurs nominales actuelles et courant continu par rapport au courant de crête
- Gestion de l’efficacité et de la température
- Fonctionnalités supplémentaires
- Liste de contrôle de sélection et tableaux comparatifs
- Exemples de couplage ESC et moteur
- Résumé et recommandations
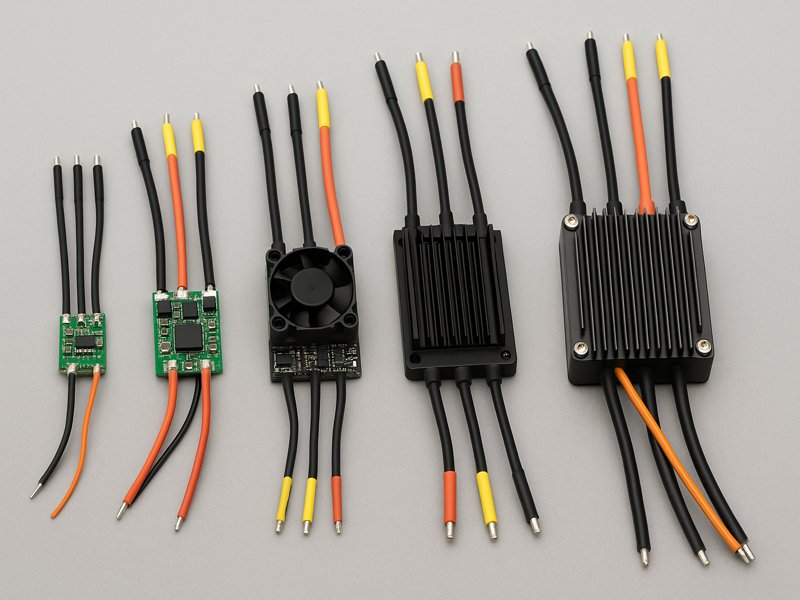
Fonctionnement de l’ESC : Principes de base
Un contrôleur de vitesse électronique (ESC) reçoit un signal de commande basse tension (comme un signal PWM provenant d’un contrôleur de vol) et commute un courant continu haute tension vers les enroulements triphasés d’un moteur BLDC selon une séquence spécifique pour le faire tourner. Cela implique :
- Commutation MOSFET haute vitesse vers les phases de commande
- Logique de commutation pour déterminer quelles phases alimenter
- Détection (force contre-électromotrice ou capteurs) pour le retour de position
- Circuits de protection contre les surtensions, les surintensités et les coupures basse tension (LVC)
Indicateurs clés :
- Tension nominale (V) : tension maximale de la batterie que le contrôleur de vitesse électronique (ESC) peut supporter.
- Courant continu (A) : courant que le contrôleur de vitesse électronique (ESC) peut supporter indéfiniment, limité par le refroidissement.
- Courant de pointe (A) : capacité de courant élevé sur une courte durée (par exemple, 10 secondes)
- Méthode de commande : PWM (six étapes) ou FOC (commande vectorielle)
- Firmware : par exemple, BLHeli, KISS, VESC, firmware FOC spécialisé
Méthodes de contrôle : PWM vs FOC
Commande PWM / « à six étapes »
Méthode traditionnelle — le variateur de vitesse pilote le moteur avec une commutation en six étapes.
Plus simple, moins gourmand en ressources de calcul, mais :
- Produit une forme d’onde en escalier — plus d’ondulation et d’ondulation de couple.
- Pas de contrôle optimal du vecteur de courant → légèrement moins efficace, plus bruyant.
FOC (Commande orientée champ)
Met en œuvre une commande vectorielle pour piloter le moteur en fonction de l’orientation du champ rotor/stator en temps réel.
Livraisons :
- Couple et rotation extrêmement fluides.
- Réduction du bruit électrique, diminution de l’échauffement du moteur.
- Rendement supérieur, notamment à bas régime et à charge partielle.
Nécessite une puissance de traitement plus importante et parfois une détection du courant et de la tension (comme les ESC basés sur VESC).
Tableau comparatif
| Fonctionnalité | PWM (six étapes) | FOC (Commande orientée champ) |
| Commutation | Six étapes | Vecteur (sinusoïdal) |
| Douceur | Modéré ; ondulation de couple | Très fluide, ondulation de couple minimale |
| Efficacité | Bien, moins à bas régime | Excellent sur une large plage de régimes. |
| Bruit (audible) | Plus élevé (bourdonnement) | Plus silencieux |
| Complexité / Coût | Inférieur | Niveau supérieur (nécessite un microcontrôleur avancé et des capteurs) |
| Exemples de firmware | BLHeli, KISS (non gratuit) | VESC, BLHeli_S (FOC), FOC personnalisé |
Considérations relatives à la tension
La tension nominale du contrôleur de vitesse électronique (ESC) doit correspondre aux exigences de tension de la batterie et du moteur :
- Caractéristiques courantes des ESC : LiPo 2S à 6S (7,4 V à 22,2 V), ou en qualité vélo électrique/loisir : 24 V, 36 V, 48 V, etc.
- Une marge de sécurité est essentielle : choisissez un contrôleur de vitesse électronique (ESC) dont la tension nominale est légèrement supérieure à celle de la batterie afin de compenser les pics de tension et les surtensions.
Exemples de tension et de batterie
| Application | Type de batterie | Tension nominale | Tension nominale du contrôleur de vitesse électronique (ESC) |
| Mini drone | 3S LiPo | ≈11,1 V | 3 S–4 S (12 V–16,8 V) |
| Drone de course FPV | 4 S LiPo | ≈14,8 V | 4 S–5 S (16,8 V–21 V) |
| Vélo électrique / Scooter | Batterie lithium-ion | ≈36V | 36 V–48 V |
| e-Rover plus grand | Batterie lithium-ion | ≈48V | 48 V–60 V |
Assurez-vous toujours que la tension maximale du contrôleur de vitesse électronique (ESC) dépasse la tension de crête sous charge (LiPo entièrement chargé ~4,2 V par cellule).
Valeurs actuelles : courant continu vs courant de pointe
Le choix du courant nominal est peut-être l’étape la plus cruciale.
- Courant continu : courant maximal que le contrôleur de vitesse électronique (ESC) peut supporter indéfiniment (généralement avec un refroidissement approprié).
- Courant de pointe : valeur nominale à court terme, par exemple 5 à 10 secondes.
Comparez toujours la valeur nominale du contrôleur de vitesse électronique (ESC) à la consommation de courant prévue de votre moteur dans vos conditions de fonctionnement.
Exemple de données de courant moteur
Supposons un Moteur BLDC à rotor externea les consommations de courant mesurées suivantes :
| Condition de charge | Tension | Consommation de courant |
| Inactif (sans charge) | 12V | 0,5 A |
| Stationnaire / charge légère | 12V | 10 A |
| Accélération maximale / lourd | 12V | 20 A |
| Décrochage | 12V | 25 A |
Dans ce cas, le ESC devrait :
- Maintenir une intensité continue d’au moins 20 A
- Gérer une impulsion de 25 A pour la sécurité et le démarrage
Tableau des valeurs nominales des ESC (Exemples de modèles)
| Modèle ESC | Tension (S LiPo) | Courant continu | Courant de pointe | Type de contrôle |
| ESC-A (budget) | 2–4 S | 20 A | 25 A (5 s) | PWM |
| ESC-B (milieu de gamme) | 3–6 S | 30 A | 40 A (10 s) | PWM / FOC |
| ESC-C (haut de gamme) | 4–6 S | 40 A | 60 A (10 s) | FOC uniquement |
| ESC-D (style vélo électrique) | 10S (~36V) | 100 A | 150 A (10 s) | FEU |
Gestion de l’efficacité et de la température
La chaleur est le pire ennemi de votre contrôleur de vitesse électronique (ESC). L’efficacité et les stratégies de refroidissement ont un impact considérable sur ses performances et sa durée de vie.
Différences d’efficacité : les contrôleurs de vitesse à flux continu (FOC) sont souvent 2 à 5 % plus efficaces en charge partielle. Dans un système 12 V consommant 20 A (240 W), une économie de 5 % représente une réduction significative de 12 W de la chaleur dégagée.
Méthodes de refroidissement :
- Dissipateurs thermiques passifs en aluminium, flux d’air
- Actifs : ventilateurs intégrés ou additionnels
- Refroidissement liquide : pour les installations à haute puissance
| Type ESC | Méthode de refroidissement | Élévation de température typique | Commentaire |
| ESC PWM économique | Ailettes passives + flux d’air | +30 °C | Peut nécessiter une ventilation externe |
| ESC FOC de milieu de gamme | Ailerons + petit ventilateur | +20 °C | Meilleures performances à charge élevée |
| ESC FOC haut de gamme | Grandes ailettes + ventilateur | +10 °C | Rarement étranglement thermique |
Fonctionnalités supplémentaires à prendre en compte
Prise en charge de la télémétrie – possibilité de transmettre le régime moteur, le courant, la tension et la température à votre contrôleur de vol.
BEC (Battery Eliminator Circuit) – régulateur intégré 5 V/6 V pour l’alimentation de la radio/du récepteur :
Intensité nominale en ampères : par exemple, 2 A, 3 A.
Programmabilité – via connexion USB, Bluetooth ou interface dédiée à potentiomètre de curseur.
Assistance au freinage – utile pour les vélos électriques et la robotique.
Modes de démarrage : démarrage progressif, freinage actif, freinage jusqu’à zéro, réglage du calage moteur.
Assistance micrologicielle :
- BLHeli : courant pour les drones multirotors, prend généralement en charge les variantes PWM et FOC.
- Firmware VESC : largement utilisé dans les skates électriques, la robotique et le réglage avancé du FOC
Liste de contrôle et comparaison des sélections ESC
Liste de contrôle de sélection ESC
- Compatibilité de tension : tension maximale du contrôleur de vitesse électronique (ESC) > tension de crête de la batterie
- Capacité actuelle : Consommation continue ≥ consommation en régime permanent ; Consommation en rafale ≥ pics de démarrage/arrêt et de pointe
- Méthode de contrôle : PWM si le coût est un facteur critique ; FOC pour l’efficacité, le bruit et la régularité.
- Solution de refroidissement : fusionner le chemin thermique avec le profil de charge du moteur
- Fonctionnalités souhaitées : télémétrie, BEC, programmation, freinage, gestion du démarrage
- Format et poids : éléments importants pour les drones et les plateformes mobiles
- Support du micrologiciel et de la communauté : disponibilité des réglages, des mises à jour et de la documentation
Tableau comparatif d’échantillons
| Modèle ESC | Tension | Courant continu | Courant de pointe | Type de contrôle | Refroidissement | Télémétrie | BEC | Notes |
| ESC-A | 2–4 S | 20 A | 25 A | MLI | Ailerons passifs | Non | 5V/2A | ESC pour drone économique |
| ESC-B | 3–6 S | 30 A | 40 A | PWM/FOC | Petit ventilateur | Oui | 5V/3A | Multicoptère de milieu de gamme prêt à l’emploi |
| ESC-C | 4–6 S | 40 A | 60 A | FEU | Ventilateur + ailerons | Oui | 6V/3A | Qualité course, FOC lisse |
| ESC-D (vélo électrique) | 10 S | 100 A | 150 A | FEU | Grandes ailettes + ventilateur | Oui | Non | Systèmes de vélos électriques à couple élevé |
Exemples de couplage : moteur et contrôleur de vitesse électronique (ESC)
Exemple 1 : Mini drone de course
- Moteur : taille 2205, KV 2300, consomme environ 15 A à plein régime sur une batterie 4S
- Batterie : 4 S LiPo (nom. 14,8 V, crête ~16,8 V)
- ESC : Nécessite ≥ 20 A en continu, ~25 A en pointe, capacité de 5 S pour la surcharge ; contrôle progressif → ESC-B (3–6 S, 30 A en continu, 40 A en pointe, PWM/FOC, petit ventilateur)
Exemple 2 : Moteur d’entraînement pour vélo électrique
- Moteur : moyeu à engrenages Outrunner, consomme 60 A en crête, 30 A en croisière sur une batterie de 36 V (10 S)
- Batterie : 36 V nominal (~42 V en crête)
- ESC : Nécessite ≥ 30 A en continu, ≥ 60 A en pointe ; FOC préférable pour la régularité et la régénération. ESC-D (10 s, 100 A en continu) convient.
Exemple 3 : Bateau radiocommandé avec charge lourde
- Moteur : Grand moteur brushless à rotor externe, consommation continue de 25 A, courant de pointe de 50 A sur 6 s
- Batterie : 6 S LiPo (22,2 V nom, 25,2 V crête)
- ESC : Nécessite ≥ 30 A en continu, ≥ 60 A en pointe ; la fonction FOC assure un fonctionnement plus silencieux sur les embarcations. Choisir ESC-C (4–6 s, 40 A en continu, 60 A en pointe, FOC).
Remarques sur la correspondance des données techniques du contrôleur de vitesse électronique (ESC) et du moteur
Calculer le courant moteur approximatif à partir de la fiche technique du moteur ou par mesure avec un tachymètre et un wattmètre.
La température du moteur et celle du contrôleur de vitesse électronique (ESC) doivent rester dans des limites de sécurité ; surveillez la température des composants lors des premiers essais.
Tenez compte de la chute de tension sous charge — les cellules peuvent chuter de 4,2 V à 3,7 V ou moins ; choisissez la marge de l’ESC en conséquence.
La mise à niveau de votre ESC (et l’utilisation du FOC) peut améliorer l’autonomie de la batterie, réduire la chaleur et rendre l’accélérateur plus réactif.
Conclusion et recommandations
Les contrôleurs de vitesse électroniques (ESC) PWM sont économiques et parfaitement adaptés à de nombreuses applications ; choisissez un modèle avec une tension et un courant nominal suffisants.
Les contrôleurs ESC FOC valent bien leur coût supplémentaire pour un fonctionnement plus fluide et plus efficace, notamment pour la robotique, les vélos électriques, les bateaux et les applications bruyantes ou de précision.
Toujours surdimensionner la tension et le courant pour garantir la fiabilité et la marge thermique.
Les fonctionnalités requises (télémétrie, BEC, freinage) doivent correspondre à votre système de contrôle et à vos besoins en matière de confort.
Utilisez les tableaux d’appariement d’exemples ci-dessus comme modèles pour sélectionner les ESC pour vos projets BLDC à rotor externe.