Les moteurs pas à pas sont réputés pour leur précision et leur répétabilité, ce qui en fait un choix incontournable en automatisation, impression 3D, machines CNC et robotique. Mais sans le bon pilote, même le meilleur moteur pas à pas peut être sous-performant. En tant que fournisseur de moteurs pas à pas, nous avons rencontré d’innombrables cas de pannes système imputables à des pilotes incompatibles ou sous-alimentés.
Qu’est-ce qu’un pilote de moteur pas à pas ?
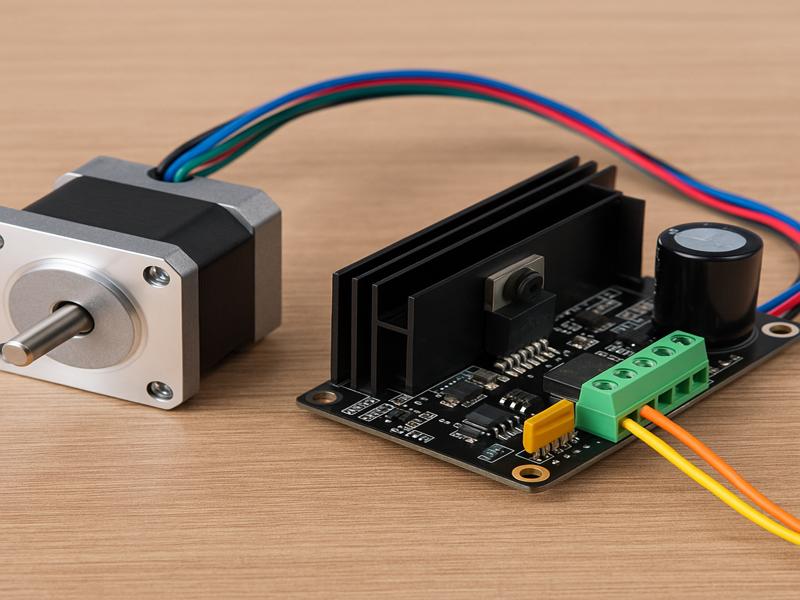
Le pilote de moteur pas à pas alimente les enroulements en courant par signaux de commande. Il interprète les impulsions de pas et de direction provenant d’un contrôleur ou d’un microcontrôleur (comme Arduino, STM32 ou PLC) et alimente les bobines dans l’ordre correct pour assurer la rotation.
Fonctions clés d’un pilote pas à pas :
- Interpréter les signaux de contrôle (pas et direction)
- Contrôler le courant fourni aux bobines
- Activez le micro-pas pour un mouvement plus fluide
- Gérer l’accélération et la décélération du moteur
- Protéger contre les surintensités, la surchauffe et les sous-tensions
Paramètres clés à prendre en compte lors du choix d’un pilote
Lors du choix d’un pilote de moteur pas à pas, il est essentiel de l’adapter aux caractéristiques électriques et mécaniques de votre moteur. Voici les facteurs essentiels :
Type de moteur (unipolaire ou bipolaire)
| Type de moteur | Description | Exigence du conducteur |
| Unipolaire | Dispose de bobines avec point central. Plus facile à piloter mais avec un couple plus faible. | Compatible avec un conducteur unipolaire (5 ou 6 fils) |
| Bipolaire | Pas de point central, nécessite un pont en H. Offre un couple plus élevé. | Nécessite un conducteur bipolaire (4 fils) |
Les moteurs bipolaires sont plus courants en raison de leur meilleur rapport couple/taille.
Tensions et courants nominaux
Faites correspondre les valeurs nominales de tension et de courant du moteur et du pilote :
- Courant (A/phase) : Le variateur doit gérer le courant nominal du moteur par phase. Choisissez toujours un variateur offrant une capacité de courant supérieure de 10 à 20 % pour la marge de sécurité.
- Tension (V) : Une tension plus élevée offre de meilleures performances à grande vitesse, mais doit rester dans les limites du pilote.
-
Exemple de moteur pas à pas Courant nominal Courant recommandé du conducteur NEMA 17 (42HS40) 1.5 A 1.7 – 2.0 A NEMA 23 (57BYGH76) 2.8 A 3.0 – 3.5 A
Prise en charge du micro-pas
Le micropas améliore la fluidité et la résolution du mouvement. Niveaux de micropas courants :
| Mode de micro-pas | Pas par révolution (moteur 1.8°) |
| Pas entier | 200 pas |
| Demi-pas | 400 pas |
| 1/4 de pas | 800 pas |
| 1/16 de pas | 3200 pas |
| 1/32 de pas | 6400 pas |
Plus de micropas = mouvement plus fluide mais nécessite des signaux plus précis et peut réduire légèrement le couple.
Interface de contrôle
Choisissez un pilote adapté à votre système de contrôle :
| Type de contrôle | Interface | Utilisation typique |
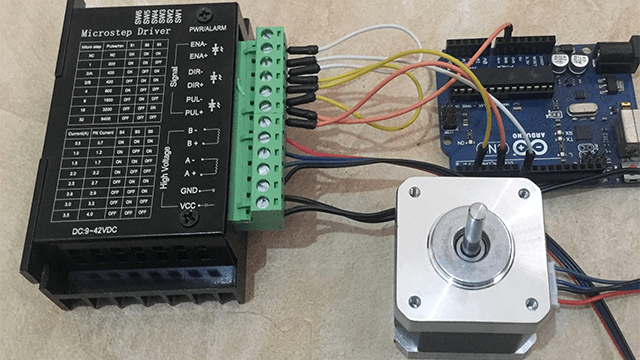
| Step/Dir | Entrée TTL | Arduino, PLCs, CNC |
| UART/I2C | Bus série | Contrôle avancé de microcontrôleur |
| USB/CAN | Contrôle hôte | Robotique, Contrôle industriel |
Pour la plupart des applications, le contrôle Step/Dir est le plus simple et le plus largement pris en charge.
Critères de sélection des principaux conducteurs
Compatibilité des valeurs nominales actuelles
Le courant nominal du variateur doit correspondre étroitement au courant nominal de phase du moteur. De nombreux variateurs modernes permettent de régler le courant via des commutateurs DIP ou un logiciel. Un courant insuffisant entraîne un faible couple, tandis qu’un courant excessif peut entraîner une surchauffe du moteur.
- Meilleure pratique : choisissez un pilote qui prend en charge au moins 10 % de courant de plus que le courant nominal du moteur, mais ne dépassez jamais le courant nominal maximal du moteur.
Tension nominale
Une tension plus élevée augmente la vitesse et le couple dynamique du moteur, mais augmente également la dissipation de puissance. Assurez-vous toujours que le variateur prend en charge la plage de tension requise par le moteur.
- Conseil : si votre moteur pas à pas est évalué à 3 V et 2 A, un pilote fonctionnant à 24 V peut considérablement améliorer les performances grâce à une alimentation plus rapide de la bobine.
Capacité de micro-pas
Le micropas divise les pas pour un mouvement plus fluide et une meilleure résolution de position. Choisissez un pilote en fonction de la résolution requise par votre application.
| Mode de micro-pas | Pas par révolution (pour moteur 1.8°) |
| Pas entier | 200 pas |
| Demi-pas | 400 pas |
| 1/4 de pas | 800 pas |
| 1/8 de pas | 1600 pas |
| 1/16 de pas | 3200 pas |
- Conseil d’application : utilisez un micropas plus élevé pour les applications de précision telles que les imprimantes 3D ou le positionnement de caméra.
Compatibilité de l’interface de contrôle
Assurez-vous que le pilote accepte le format du signal de commande fourni par votre contrôleur de mouvement :
- Étape/Direction (le plus courant pour l’impression CNC et 3D)
- Modulation de Largeur d’impulsion
- Série (UART/I²C/SPI)
- Contrôle analogique
- CANopen ou EtherCAT pour les applications industrielles
Type de conducteur (Chopper vs. G/D Drive)
| Type de conducteur | Description |
| Conducteurs L/R | Simple, utilise des résistances pour limiter le courant, moins efficace |
| Conducteurs à découpage | Utilise un commutateur haute fréquence pour réguler dynamiquement le courant, plus efficace |
Les entraînements par hacheur sont désormais la norme de l’industrie en raison de leurs performances et de leur efficacité.
Choisir le type de pilote
Voici les technologies de pilotes les plus courantes :
Pilotes L/R (résistance linéaire)
- Simple et peu coûteux
- Idéal pour les applications à faible vitesse et à faibles performances
- Efficacité limitée
Pilotes de hacheur (contrôle de courant PWM)
- Utiliser la modulation de largeur d’impulsion pour contrôler le courant de la bobine
- Plus efficace
- Permet le micro-pas et le contrôle dynamique du courant
- Exemples : A4988, DRV8825, TB6600
Pilotes pas à pas en boucle fermée
- Inclure un encodeur pour le retour d’information
- Prévenir les erreurs
- Offre des performances de type servo
- Coût plus élevé, utilisé dans des applications exigeantes
-
Type de conducteur Coût Rétroaction Convient pour Conducteur L/R Faible Non Projets DIY de base ou éducatifs Conducteur PWM Moyen Non Imprimantes 3D, CNC, automatisation générale Boucle fermée Élevé Oui Robotique, mouvement de précision, charges lourdes
Tableau de sélection des pilotes de moteur pas à pas
Voici un tableau de référence rapide des moteurs pas à pas courants et des pilotes appropriés :
| Modèle de moteur | Taille | Tension | Courant | Modèle de conducteur adapté | Micro-pas | Notes |
| 42HS40 NEMA 17 | 17 | 12V | 1.5A | A4988, DRV8825 | 1/16 | Bon pour les imprimantes 3D |
| 57BYGH76 NEMA 23 | 23 | 24–48V | 2.8A | TB6600, DM542 | 1/32 | Routeur CNC, graveur laser |
| 86BYG250 NEMA 34 | 34 | 48V | 6.0A | DM860, Leadshine CL86T | Boucle fermée | Applications lourdes |
Fonctionnalités supplémentaires à rechercher
Lors du choix d’un pilote, ces fonctionnalités peuvent améliorer les performances et la fiabilité :
Protection contre les surintensités et les surchauffes
Protège le moteur et le pilote contre les dommages causés par une surcharge ou une surchauffe.
Limitation de courant réglable
Permet un réglage précis pour correspondre aux spécifications du moteur et éviter un échauffement excessif.
Réduction du courant de ralenti
Réduit le courant lorsque le moteur est au ralenti, réduisant ainsi la chaleur et la consommation d’énergie.
Dissipateur thermique ou ventilateur intégré
Essentiel pour les pilotes à courant plus élevé afin de maintenir la stabilité de la température.
Pilote adapté à l’alimentation
Assurez-vous que l’alimentation électrique répond aux besoins de tension et de courant des deux côtés.
| Conducteur de moteur | Tension d’alimentation recommandée | Notes |
| A4988 | 8–35V | Utilisez 12V ou 24V pour de meilleures performances |
| DRV8825 | 8.2–45V | Bon pour les moteurs de moyenne gamme |
| TB6600 | 9–42V | Utilisez 24V ou plus pour un couple à haute vitesse |
| DM542 | 18–50V | De qualité industrielle, excellent pour NEMA 23 |
- Règle empirique : courant total = 1,5 x courant nominal du moteur (pour la marge)
Exemples d’application
Exemple 1 : Imprimante 3D (NEMA 17 + A4988)
- Faible couple, haute précision
- Faible coût, espace limité
- Pilote : A4988 ou DRV8825
- Puissance : 12–24 V à 2 A
Exemple 2 : Routeur CNC (NEMA 23 + TB6600)
- Couple moyen, mouvement rapide
- Pilote : TB6600 ou DM542
- Puissance : 24–48 V à 4 A
Exemple 3 : Système de bande transporteuse (NEMA 34 + entraînement en boucle fermée)
- Couple élevé et rétroaction requis
- Pilote : Leadshine CL86T
- Puissance : 48 V à 6–8 A
Erreurs courantes à éviter
- Courant de conducteur sous-estimé : peut entraîner des sauts d’étapes ou un blocage du mouvement.
- Interface de contrôle incorrecte : provoque une défaillance de communication avec votre microcontrôleur ou votre PLC.
- Mauvais refroidissement : entraîne une surchauffe et l’arrêt du pilote.
- Mouvement bruyant : causé par un manque de micro-pas ou une mauvaise fréquence PWM.
- Surtension : endommage l’isolation du pilote ou du moteur.
Choisir le bon pilote ne se résume pas à une simple correspondance des spécifications. Il est essentiel de comprendre les exigences de votre application, les caractéristiques du moteur et vos objectifs de performance. Un pilote adapté garantit un fonctionnement fluide, efficace et durable du moteur pas à pas.
Que vous construisiez une imprimante 3D amateur ou un système CNC industriel, utilisez ce guide pour comparer les options de pilote en fonction du courant, de la tension, de la méthode de contrôle, du micropas et des fonctions de protection.
Vous hésitez encore ? En tant que fournisseur professionnel de moteurs pas à pas et de pilotes, nous vous proposons une assistance technique et vous aidons à trouver le pilote adapté à vos besoins. Contactez-nous à tout moment !