Hersteller von Miniatur Motoren
Wir sind spezialisiert auf die Entwicklung und Herstellung einer Reihe von Niederspannungs-Miniaturmotoren, darunter bürstenbehaftete und bürstenlose Gleichstrommotoren, Schrittmotoren und Servomotoren mit optionaler Encoderintegration. Diese Motoren sind kompakt, leicht, energieeffizient und auf die Minimierung elektromagnetischer Störungen ausgelegt, sodass sie in einer Vielzahl von Anwendungen problemlos eingesetzt werden können.
Wir können die folgenden Parameter bereitstellen. Wenn Sie speziellere Spezifikationen wünschen, können wir diese auch individueller gestalten:
- Größe: Länge: 5 mm – 150 mm, Durchmesser: 4 mm – 100 mm
- Spannung: 1,5 V – 24 V
- Gewicht: 5g-150g
- Drehzahl: 300-50.000 U/min
Home / Miniatur Motoren
Nach Größe
Miniaturmotoren gibt es in verschiedenen Größen. Normalerweise sind sie kompakt und für den Einsatz in kleinen Geräten konzipiert. Wenn Sie individuelle Anforderungen haben, können Sie uns mit Zeichnungen kontaktieren.
Durchmesser: 4 mm bis 12 mm
- Der Durchmesser des Motorgehäuses, üblicherweise an der breitesten Stelle des zylindrischen Körpers gemessen.
- Der Durchmesser des Motors bestimmt häufig seine Leistungskapazität und sein Drehmoment. Kleinere Durchmesser eignen sich für Anwendungen mit geringer Leistung, größere Durchmesser bieten ein höheres Drehmoment.
Länge: 10 mm bis 25 mm
- Die Länge des Motorkörpers von der Basis bis zum Ende, ohne Welle.
- Die Länge eines Mikromotors hängt eng mit seiner Leistung und seinem Drehmoment zusammen, da ein längerer Motor größere Wicklungen und Magnete beherbergen kann.
Schaftdurchmesser: 0,8 mm bis 2 mm
- Der Durchmesser der Ausgangswelle des Motors überträgt die Drehbewegung auf die angeschlossenen Komponenten.
- Größere Wellendurchmesser (bis zu 2 mm) sind stabiler und ermöglichen robustere Befestigungen und die Handhabung höherer Belastungen.
Schaftlänge: 5 mm bis 10 mm
- Die Länge der Ausgangswelle, die aus dem Motorkörper herausragt.
- Die Wellenlänge bestimmt, wie einfach der Motor mit externen Komponenten verbunden werden kann. Die längere Welle bietet Flexibilität bei der Montage und Ausrichtung mit anderen Komponenten.
Hier sind einige gängige Größen für unsere miniatur motoren
 |
4mm x 8mm (N10 Größe) | Häufig in Mini-Vibrationsgeräten oder ultrakompakten Designs. |
| 6mm x 12mm (Größe N20) | Wird häufig in der Robotik und in kleinen Elektronikprojekten verwendet. | |
| 8mm x 16mm (Größe N30) | Etwas größer, bietet mehr Drehmoment für kleine Roboter. | |
| 10mm x 20mm (Größe N40) | Bietet mehr Leistung und wird in Minirobotern und Modellprojekten verwendet. | |
| 15mm x 25mm | Wird in etwas größeren Hobbyanwendungen verwendet, die dennoch kompakte Motoren erfordern. | |
| 16mm x 30mm | Häufig in kleinen Werkzeugen oder kompakten Systemen mit hohem Drehmoment. |
Nach aktuellem Stand
Wir bieten sowohl Wechsel- als auch Gleichstrom-Miniaturmotoren an, die sich ideal für verschiedene Anwendungen eignen, bei denen Präzision, Effizienz und kompaktes Design erforderlich sind.

Wechselstrom
- Betrieb mit Wechselstrom (AC).
- AC Miniatur Motoren werden häufiger in stationären oder Dauereinsatzanwendungen mit stabiler Stromversorgung eingesetzt und bieten einen reibungslosen und effizienten Betrieb bei konstanter Geschwindigkeit.
Gleichstrom
- Betrieb mit Gleichstrom (DC).
- Gleichstrom miniatur motoren werden bevorzugt für tragbare, batteriebetriebene Geräte verwendet, bei denen eine einfache Drehzahlregelung, ein leichtes Design und eine Kosteneffizienz von entscheidender Bedeutung sind.
Von 0 bis N - Komplettlösungen für Motoren
Nach Kommutierungsmethode
Beide Motortypen nutzen elektromagnetische Induktion zur Drehbewegung und unterscheiden sich in Bürsten bzw. elektronischen Steuerungen.
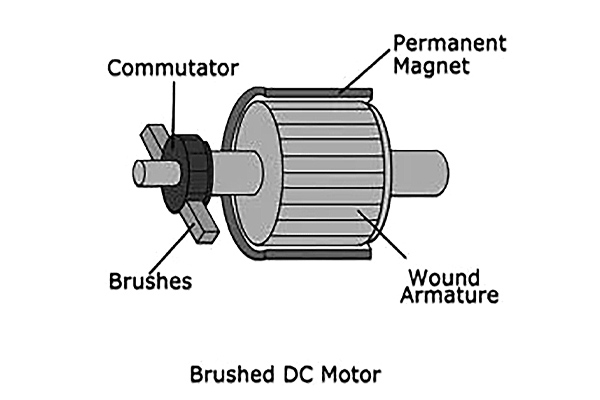
Gebürstet
- Bürstenbehaftete miniatur motoren verwenden Bürsten, um Strom auf die Wicklungen des Rotors zu übertragen, was aufgrund der Reibung zu einer geringeren Effizienz führt. Ihre Lebensdauer ist aufgrund des Verschleißes der Bürsten kürzer und liegt normalerweise zwischen 1.000 und 10.000 Stunden.
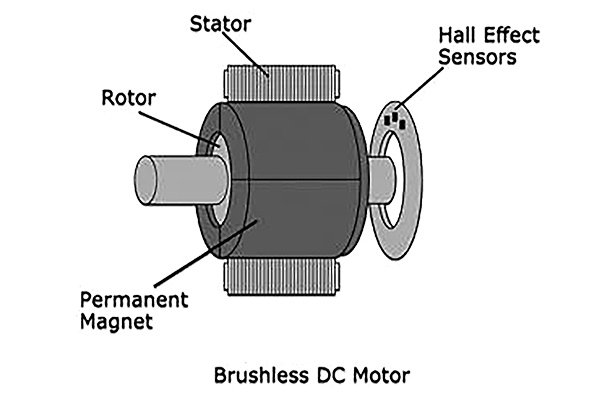
Bürstenlos
- Bürstenlose Motoren benötigen keine physischen Bürsten, da sie einen elektronischen Controller verwenden, der den durch die Statorwicklungen fließenden Strom steuert. Dies führt zu einer höheren Effizienz (80-90 %) und einer viel längeren Lebensdauer, die oft 20.000 Stunden übersteigt, da es keinen Bürstenverschleiß gibt.
Nach Typ
Mikrokernlose Schritt- und Servomotoren wandeln elektrische Energie in mechanische Bewegung um, sind kompakt, werden mit Gleichstrom betrieben und erzeugen ihr Drehmoment elektromagnetisch.

Mikrokernloser Motor
- Der Rotor verwendet eine leichte Spule anstelle eines Metallkerns. Verwendet Bürsten und Kommutator, mit schnellerer Beschleunigung aufgrund des leichteren Rotors.
- Spannung: 1,5V - 24V
- Geschwindigkeit: 700 - 30.000 U/min
- Drehmoment: 0,1 - 100 mN·m
Mikro Schrittmotor
- Sie unterteilen die Rotation in Schritte, wobei Mikroschritte für eine sanftere Bewegung und höhere Präzision sorgen, indem sie Spulen nacheinander für eine Teilbewegung aktivieren.
- Spannung: 2V - 12V
- Geschwindigkeit: 100 - 10.000 U/min
- Genauigkeit: 1,8° pro Schritt

Mikro Servomotor
- Sie nutzen Rückkopplungsmechanismen und PWM-Signale, um die Winkelposition präzise zu steuern, und passen die Genauigkeit durch eine Rückkopplungsschleife an.
- Spannung: 4,8V - 24V
- Geschwindigkeit: 0,1 bis 0,2 Sekunden pro 60°-Drehung
- Drehung: Normalerweise 180°, es gibt jedoch Modelle mit kontinuierlicher Drehung.
Vergleich von 3 Mikromotortypen
|
Besonderheit |
Mikrokernloser Motor |
Mikro Schrittmotor |
Mikro Servomotor |
|
Design |
Gebürsteter Gleichstrommotor mit leichtem Rotor |
Mehrere Spulen und diskrete Schrittweite |
Gebürsteter Gleichstrom mit Rückkopplungsschleife |
|
Betrieb |
Konstante Drehzahl, geregelt durch Spannung |
Schrittweise Rotation durch Impulse gesteuert |
Positionssteuerung über PWM-Signal |
|
Präzision |
Mäßig |
Hohe Präzision |
Mäßige Präzision, typischerweise 1,5°/Schritt |
|
Geschwindigkeit |
Hohe Geschwindigkeit (bis zu 30.000 U/min) |
Geringere Geschwindigkeit (normalerweise 1.000 – 10.000 U/min) |
Mäßig (typischerweise 0,1 – 0,2 s/60°) |
|
Drehmoment |
Mäßig |
Hohes Drehmoment bei niedrigen Drehzahlen |
Niedrig bis mittel (bis zu 2 Nm) |
Anwendungen

Unterhaltungselektronik
- Miniatur Vibrationsmotor: Wird in Mobiltelefonen, Spielecontrollern und anderen tragbaren Geräten für haptisches Feedback (Vibrationswarnungen) verwendet.
- Kleine Lüfter: In Kühlsystemen für Computer, Laptops und tragbare elektronische Geräte.
- Kamerastabilisierung: Zur Steuerung von Kardanringen und Objektivfokussierung in Digitalkameras und Smartphones.

Robotik
- Aktuatoren: In kleinen Robotern, Roboterarmen, Drohnen und Spielzeugen, wo eine präzise Bewegungssteuerung erforderlich ist.
- Servomotoren: Zur Steuerung der Position von Robotergelenken, Rädern oder anderen beweglichen Teilen in einem Robotersystem.
- Mikroroboter: Miniaturroboter für medizinische, militärische oder Forschungszwecke, bei denen Platz und Gewicht eine entscheidende Rolle spielen.

Medizinische Geräte
- Miniaturpumpen: Für Arzneimittelabgabesysteme, Insulinpumpen oder kleine Flüssigkeitstransfergeräte.
- Zahnärztliche Ausrüstung: Mikromotoren werden in Zahnbohrern, Reinigungsgeräten und anderen Präzisionswerkzeugen verwendet.
- Chirurgische Instrumente: In der roboterassistierten Chirurgie oder bei Mikrooperationen verwendete Präzisionsinstrumente.

Automobilindustrie
- Elektrische Aktuatoren: Zur Steuerung kleiner Funktionen im Fahrzeug wie Sitzverstellung, Spiegel oder Fensterheber.
- Kleine Pumpen: Für Kraftstoffsysteme oder Kühlsysteme.
- Sensoren und Steuerungssysteme: Miniatur motoren in Sensoren oder Geräten, die für genaue Messungen kleine, aber effiziente Bewegungen erfordern.
Industrie und Automatisierung
- Mikropumpen: Im industriellen Flüssigkeitsmanagement oder bei chemischen Prozessen.
- Präzisionsantriebe: Für kleine automatisierte Maschinen wie 3D-Drucker, CNC-Maschinen oder Fördersysteme.
- Vibrationssysteme: Zum Testen von Geräten oder zum Simulieren realer Bedingungen.

Luft- und Raumfahrt
- Drohnen: Bei kleinen unbemannten Luftfahrzeugen (UAVs) sorgen Mikromotoren für Antrieb und Steuerung.
- Satellitenausrüstung: Wird in Aktuatoren für Antennen oder Steuerflächen in kompakten Satellitensystemen verwendet.
- Mikrotriebwerke: In der Luft- und Raumfahrt zur Feinsteuerung bei der Navigation von Raumfahrzeugen.
