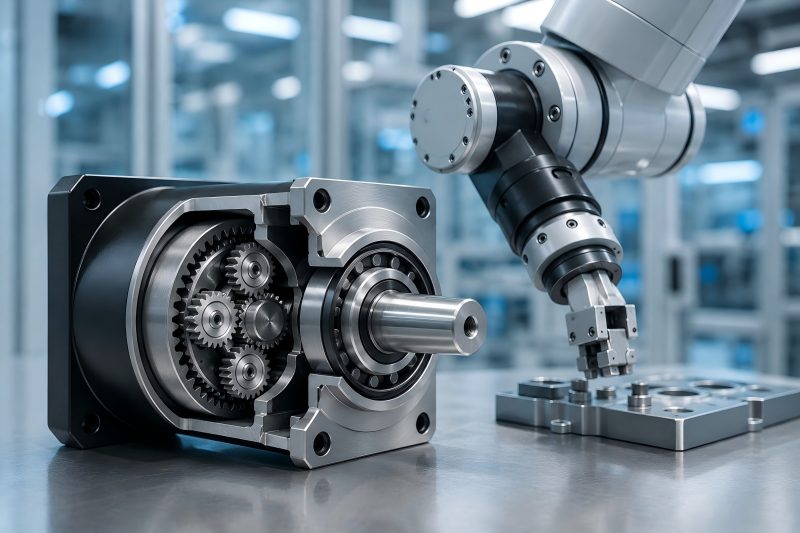
تتميز محركات التروس الكوكبية المستخدمة في مجال الروبوتات بكثافة عزم دوران عالية، وحجم صغير، وتشغيل سلس، وأداء قوي في تحديد المواقع. وتستخدم على نطاق واسع في الأذرع الروبوتية، والمركبات ذاتية القيادة (AGVs)، والمركبات ذاتية التنقل (AMRs)، والروبوتات الخدمية، وروبوتات الفحص، وأنظمة الأتمتة الصناعية.
لماذا تُستخدم محركات التروس الكوكبية في الروبوتات
غالبًا ما تحتاج الروبوتات إلى أداء حركات متكررة بدقة عالية. قد يدور المحرك البسيط بسرعة كبيرة جدًا ولا يوفر عزم دوران كافٍ للمهام التي تتطلب حمولة ثقيلة أو دقة عالية. يحل صندوق التروس الكوكبي هذه المشكلة عن طريق تقليل السرعة وزيادة عزم الدوران.
على سبيل المثال، قد يحتاج مفصل الروبوت إلى دوران بطيء ومحكوم أثناء حمل أداة أو قابض أو حمولة. يمكن لمحرك التروس الكوكبي توفير عزم الدوران المطلوب مع مساعدة نظام التحكم في الحفاظ على حركة سلسة ودقيقة.
التطبيقات الشائعة في مجال الروبوتات
| تطبيق الروبوتات | وظيفة محرك التروس الكوكبي | المتطلبات الرئيسية |
| أذرع الروبوت | دوران المفاصل وتحديد المواقع | عزم دوران عالي، تفاعل منخفض، تحكم سلس |
| المركبات ذاتية القيادة (AGV) والمركبات ذاتية التنقل (AMR) | نظام الدفع والتوجيه | المتانة والكفاءة والحجم الصغير |
| روبوتات الخدمة | حركة الذراع أو العجلات أو الرفع | تشغيل هادئ، سرعة ثابتة |
| روبوتات الفحص | حركة المسار أو العجلات أو الكاميرا | مقاومة الصدمات، تحكم موثوق |
| الروبوتات التعاونية | حركة مشتركة ومحرك خفيف الوزن | الدقة، والسلامة، والتصميم المدمج |
| روبوتات أتمتة المستودعات | الرفع والنقل والتحديد | دورة تشغيل عالية، وعمر خدمة طويل |
المزايا الرئيسية لمحركات التروس الكوكبية المستخدمة في الروبوتات
عزم دوران عالي في حجم صغير
تتمثل إحدى أكبر مزايا محركات التروس الكوكبية في كثافة عزم الدوران العالية. ونظرًا لأن الحمل يتم تقاسمه بين عدة تروس كوكبية، يمكن لصندوق التروس نقل عزم دوران أكبر دون الحاجة إلى هيكل كبير.
وهذا أمر مهم في مجال الروبوتات، حيث يعد المساحة الداخلية المدمجة أمرًا ضروريًا. وتستفيد الأذرع الروبوتية والمنصات المتحركة وأنظمة الأتمتة المدمجة جميعها من وحدة محرك أصغر حجمًا ذات قوة خرج عالية.
دقة حركة أفضل
غالبًا ما تتطلب تطبيقات الروبوتات تحكمًا دقيقًا في الموضع. يمكن لمحركات التروس الكوكبية أن تدعم الحركة الدقيقة عند دمجها مع المحركات والمشفرات وأنظمة التحكم المناسبة.
تعتبر علب التروس الكوكبية منخفضة الارتداد مفيدة بشكل خاص للمفاصل الروبوتية والملاقط وآليات تحديد الموضع. يعني الارتداد المنخفض خطأً أقل في الحركة عندما يغير المحرك اتجاهه.
تشغيل سلس بسرعة منخفضة
تتطلب العديد من حركات الروبوتات تشغيلًا منخفض السرعة يمكن التحكم فيه بدلاً من الدوران السريع. تعمل علبة التروس الكوكبية على تقليل سرعة المحرك مع زيادة عزم الدوران الناتج.
يساعد ذلك الروبوتات على التحرك بسلاسة أكبر أثناء مهام الرفع، والانعطاف، والإمساك، والدوران، وتحديد المواقع.
توزيع قوي للحمل
توزع التروس الكوكبية الحمل على عدة نقاط تلامس، مما يحسن القوة ويساعد علبة التروس على تحمل عمليات التشغيل والتوقف والحركات العكسية المتكررة.
وهذا أمر مهم بالنسبة للروبوتات الصناعية وروبوتات المستودعات، لأنها غالبًا ما تعمل بشكل مستمر في ظل ظروف صعبة.
كفاءة عالية
بالمقارنة مع بعض أنظمة تخفيض التروس التقليدية، عادةً ما توفر علب التروس الكوكبية كفاءة نقل جيدة. وهذا يحسن الكفاءة ويقلل من تراكم الحرارة.
بالنسبة للروبوتات التي تعمل بالبطاريات، مثل المركبات ذاتية القيادة (AGVs) والروبوتات المتنقلة المستقلة (AMRs) وروبوتات التوصيل وروبوتات الفحص، يمكن أن تدعم الكفاءة العالية وقت تشغيل أطول.
تركيب مدمج ومرن
تتوفر محركات التروس الكوكبية بأحجام ونسب وأنماط أعمدة خرج وخيارات تركيب مختلفة. وهذا يتيح سهولة الدمج في تصميمات الروبوتات المتنوعة.
ويمكن استخدامها في وحدات العجلات والمفاصل الروبوتية والمنصات الدوارة وأنظمة الرفع وأجهزة الأتمتة المخصصة.
محرك التروس الكوكبي مقابل أنواع محركات التروس الأخرى في مجال الروبوتات
| نوع محرك التروس | المزايا | القيود | الاستخدام المناسب في الروبوتات |
| محرك التروس الكوكبي | كثافة عزم دوران عالية، صغير الحجم، فعال، دقيق | تكلفة أعلى من علب التروس البسيطة | أذرع الروبوتات، المركبات ذاتية القيادة (AGV)، المركبات ذاتية التنقل (AMR)، المفاصل الدقيقة |
| محرك التروس الدودية | نسبة تخفيض عالية، خيار القفل الذاتي | كفاءة أقل، حرارة أعلى | آليات الرفع، أنظمة السرعة المنخفضة |
| محرك التروس المستقيمة | هيكل بسيط، فعال من حيث التكلفة | ضوضاء أكثر، كثافة عزم دوران أقل | الروبوتات الأساسية، الحركة الخفيفة |
| محرك التروس الحلزونية | تشغيل سلس، قدرة تحميل أعلى | حجم أكبر، هيكل أكثر تعقيدًا | الأتمتة الصناعية والروبوتات الثقيلة |
| محرك الدفع التوافقي | دقة عالية جدًا، حجم صغير | تكلفة أعلى، مقاومة أقل للصدمات | الروبوتات التعاونية، مفاصل روبوتية دقيقة |
في العديد من تطبيقات الروبوتات، توفر محركات التروس الكوكبية توازنًا عمليًا بين الدقة والعزم والكفاءة والتكلفة.
نصائح مهمة لاختيار محركات التروس الكوكبية في مجال الروبوتات
لا يقتصر اختيار محرك التروس الكوكبي المناسب على قوة المحرك فحسب. يجب أن يأخذ الاختيار في الاعتبار عزم الدوران والسرعة والارتداد ودورة التشغيل وطريقة التحكم ومساحة التركيب وبيئة التشغيل.
تحديد متطلبات الحمل
ابدأ بحساب الحمل الذي يحتاج الروبوت إلى تحريكه. ويشمل ذلك وزن أجزاء الروبوت والحمولة والأدوات والعجلات والأذرع أو آلية الرفع.
بالنسبة للأذرع الروبوتية، تتغير متطلبات عزم الدوران اعتمادًا على طول الذراع وموضع الحمولة. بالنسبة للروبوتات المتحركة، يجب أن يتغلب المحرك على مقاومة الدوران ومتطلبات التسارع وزاوية المنحدر ووزن الحمولة.
تشمل العوامل الرئيسية ما يلي:
- وزن الحمولة
- طول الذراع أو نصف قطر العجلة
- متطلبات التسارع
- زاوية التشغيل
- الاحتكاك والمقاومة
- عامل الأمان
قد يتعرض المحرك الصغير جدًا لارتفاع درجة الحرارة أو التعطل المبكر. وقد يؤدي المحرك الكبير جدًا إلى زيادة التكلفة والوزن واستهلاك الطاقة.
اختر نسبة التروس الصحيحة
| نطاق نسبة التروس | ميزة الإخراج | التطبيق النموذجي في مجال الروبوتات |
| 3:1–10:1 | سرعة أعلى، عزم دوران معتدل | حركة دورانية سريعة، عجلات خفيفة |
| 10:1–30:1 | سرعة وعزم دوران متوازنان | المفاصل الروبوتية، روبوتات الخدمة، المركبات ذاتية القيادة الصغيرة (AGV) |
| 30:1–100:1 | عزم دوران عالي، سرعة منخفضة | الرفع، مفاصل الأحمال الثقيلة، وحدات التوجيه |
| 100:1 | عزم دوران مرتفع جدًا، سرعة منخفضة جدًا | التحديد الخاص للمواقع أو الأتمتة شديدة التحمل |
يجب أن تتوافق أفضل نسبة تروس مع السرعة والعزم المطلوبين للروبوت، وليس فقط مع السعة القصوى للمحرك.
انتبه إلى التراخي
الارتداد هو الفجوة الصغيرة في الحركة بين التروس. في مجال الروبوتات، يمكن أن يؤثر الارتداد على دقة تحديد المواقع، والتكرار، واستجابة التحكم.
بالنسبة لأنظمة الدفع البسيطة بالعجلات، قد يكون الارتداد المعتدل مقبولاً. أما بالنسبة للأذرع الروبوتية، وأنظمة تحديد مواقع الكاميرات، أو الملاقط الدقيقة، فعادةً ما يكون الارتداد المنخفض مطلوباً.
إرشادات عامة:
- المفاصل الروبوتية عالية الدقة: اختر علب التروس الكوكبية ذات التباطؤ المنخفض
- عجلات الروبوتات المتحركة: قد يكون التراخي القياسي مقبولاً
- الروبوتات التفتيشية أو المزودة بكاميرات: يقلل التباطؤ المنخفض من دقة التوجيه
- الروبوتات التعاونية: يدعم التباطؤ المنخفض حركة أكثر سلاسة وأمانًا
توافق نوع المحرك
يمكن دمج علب التروس الكوكبية مع محركات مختلفة، بما في ذلك محركات التيار المستمر، ومحركات التيار المستمر بدون فرش، ومحركات السائر، ومحركات المؤازرة.
لكل نوع من المحركات مزايا مختلفة.
| نوع المحرك | المزايا | أفضل استخدام |
| محرك التيار المستمر مع علبة التروس الكوكبية | تحكم بسيط، فعال من حيث التكلفة | الروبوتات الصغيرة، الحركات الخفيفة |
| محرك تروس كوكبي BLDC | كفاءة عالية، عمر طويل، صيانة قليلة | المركبات ذاتية القيادة (AGV)، الروبوتات ذاتية التنقل (AMR)، روبوتات الخدمة |
| محرك تروس كوكبي متدرج | تحديد موقع جيد، إمكانية التحكم في الحلقة المفتوحة | تحديد المواقع بسرعة منخفضة، أتمتة صغيرة |
| محرك تروس كوكبي مؤازر | دقة عالية، استجابة سريعة، تحكم في حلقة مغلقة | أذرع روبوتية، مفاصل دقيقة، روبوتات صناعية |
بالنسبة للروبوتات عالية الأداء، غالبًا ما يُفضل استخدام محركات التروس الكوكبية المؤازرة أو BLDC لأنها توفر تحكمًا وكفاءة وموثوقية أفضل.
ضع في اعتبارك الكفاءة والحرارة
غالبًا ما تعمل الروبوتات لفترات طويلة. إذا كانت كفاءة محرك التروس منخفضة، فقد يولد المزيد من الحرارة ويستهلك المزيد من الطاقة.
هذا مهم بشكل خاص بالنسبة لـ:
- الروبوتات المتنقلة التي تعمل بالبطاريات
- المفاصل الروبوتية المغلقة
- أنظمة الأتمتة ذات دورة العمل العالية
- الروبوتات التي تعمل في بيئات دافئة
يساعد محرك التروس الكوكبي عالي الكفاءة على تحسين وقت التشغيل وتقليل الإجهاد الحراري وحماية المكونات الداخلية.
تحقق من الحجم ومساحة التركيب
عادةً ما تكون الأنظمة الروبوتية مقيدة بمساحة محدودة. قبل اختيار محرك تروس كوكبي، تحقق من مساحة التركيب المتاحة، ونمط فتحات التثبيت، ونوع العمود، واتجاه الكابل، وطول علبة التروس.
تشمل الأبعاد المهمة ما يلي:
- قطر علبة التروس
- الطول الإجمالي للمحرك
- قطر عمود الخرج
- حجم شفة التثبيت
- موضع الكابل أو الموصل
- المساحة المطلوبة للمشفّر
بالنسبة للروبوتات المدمجة، يمكن لمحرك التروس الكوكبية الأقصر والأخف وزنًا تحسين التصميم الميكانيكي وتقليل الوزن الإجمالي للنظام.
تقييم دورة التشغيل وعمر الخدمة
قد تتضمن تطبيقات الروبوتات حركات بدء وتوقف متكررة، أو عكس اتجاه متكرر، أو أحمال صدمية، أو تشغيل مستمر. يجب أن يكون محرك التروس المحدد قادرًا على التعامل مع دورة التشغيل الفعلية.
بالنسبة للروبوتات الصناعية أو المركبات ذاتية القيادة (AGV)، تعد المتانة أمرًا بالغ الأهمية. يجب أن يحتوي صندوق التروس على محامل قوية، وتزييت مستقر، وتروس مقواة، ومانع تسرب مناسب.
يجب أن تضع في اعتبارك ما يلي:
- التشغيل المستمر أو المتقطع
- عدد مرات التشغيل والتوقف في الساعة
- تغييرات الاتجاه
- تقلبات الحمل
- ساعات التشغيل المتوقعة
- متطلبات الصيانة
اختر المشفر المناسب وردود الفعل للتحكم
بالنسبة للروبوتات الدقيقة، قد يحتاج المحرك إلى مشفر لتغذية مرتدة للموضع والسرعة والاتجاه. وهذا يسمح لنظام التحكم بمراقبة الحركة وتصحيح الأخطاء.
يعتمد اختيار المشفر على الدقة المطلوبة. توفر المشفرات ذات الدقة الأعلى تغذية مرتدة أفضل ولكنها قد تزيد من التكلفة وتعقيد التحكم.
عادة ما تحتاج الأذرع الروبوتية والروبوتات التعاونية وأنظمة تحديد موضع الكاميرا إلى تحكم أفضل في التغذية المرتدة مقارنة بالروبوتات ذات الدفع العجلي البسيط.
الأخطاء الشائعة عند اختيار محركات التروس الكوكبية للروبوتات
تنشأ العديد من مشاكل الاختيار من التركيز فقط على عزم الدوران المقنن أو قوة المحرك. في أنظمة الروبوتات الحقيقية، يعتمد الأداء على ظروف التشغيل الكاملة.
تشمل الأخطاء الشائعة ما يلي:
- اختيار نسبة التروس دون التحقق من سرعة الخرج النهائية
- تجاهل عزم الدوران الأقصى أثناء التسارع
- استخدام علب تروس ذات رد فعل عكسي قياسي للمفاصل الدقيقة
- اختيار محرك أكبر من اللازم بالنسبة لهيكل الروبوت
- تجاهل تراكم الحرارة في الأماكن المغلقة
- نسيان توافق جهاز التشفير وجهاز التحكم
- عدم مراعاة الأحمال الصدمية والانعكاس المتكرر
- الاختيار على أساس السعر بدلاً من الأداء طوال دورة الحياة
يجب أن تحقق عملية الاختيار الصحيحة التوازن بين الأداء والحجم والتحكم والمتانة والتكلفة.
كيفية اختيار محرك تروس كوكبي لمشروع روبوتات
يمكن أن تتبع عملية الاختيار العملية الخطوات التالية:
- تحديد نوع حركة الروبوت: الدفع بالعجلات، دوران المفاصل، الرفع، الإمساك، أو التوجيه.
- احسب عزم الدوران والسرعة المطلوبين عند عمود الخرج.
- اختر نسبة تروس مناسبة بناءً على احتياجات السرعة وعزم الدوران.
- اختر نوع المحرك وفقًا لمتطلبات التحكم.
- تأكيد مستوى التباطؤ لضمان دقة تحديد الموضع.
- تحقق من توافق الجهد والتيار ووحدة التحكم والمشفّر.
- مراجعة الحجم والوزن وهيكل التثبيت وتصميم العمود.
- ضع في اعتبارك بيئة التشغيل ودورة العمل وعمر الخدمة.
- اختبر المحرك في ظل ظروف الحمل الحقيقية قبل الإنتاج الضخم.
