ステッピングモーターと呼ばれる電気モーターは、回転位置、速度、方向を正確に制御する必要がある用途で頻繁に使用されます。通常のDCモーターとは異なり、ステッピングモーターは離散的なステップで動作するため、モーターの動きをより細かく制御できます。
ステッピングモーターとは?
各ステップはモーターシャフトの角度回転であり、モーターは設定されたステップ数だけ回転するように制御できます。これらのモーターは、モーターの設計に応じて、通常0.9°~1.8°の範囲で固定量回転するように設計されています。
ステッピングモーターは、フィードバックシステムを必要とせずに微細な制御を実現できることが、他の種類のモーター(ブラシ付きDCモーターなど)に対する主な利点です。ステッピングモーターは通常、モーターの巻線に一連の電気パルスを送信することで制御され、各パルスでモーターは1ステップ前進または後退します。
ステッピングモーターの種類
制御技術の詳細に入る前に、モーターの制御方法に影響を与えるステッピングモーターの種類を理解することが重要です。
永久磁石(PM)ステッピングモーター:
- ローターに永久磁石を搭載したこれらのモーターは、低速時にトルクと効率が向上します。
- 最も一般的なタイプのステッピングモーターであり、低速アプリケーションに最適です。
可変リラクタンス(VR)ステッピングモーター:
- これらのモーターでは、ローターは軟鉄で作られており、ステーターに通電すると磁気抵抗の変化によってローターの動きが誘導されます。
- PMモーターと比較すると、トルクは低くなりますが、速度性能は向上します。
ハイブリッドステッピングモーター:
- VR型ステッピングモーターとPM型ステッピングモーターの特性を組み合わせたハイブリッド型ステッピングモーターです。高トルク、精度、速度のバランスが取れています。
- ハイブリッド型ステッピングモーターは、産業用途で最も広く使用されています。
ステッピングモーター制御の基本原理
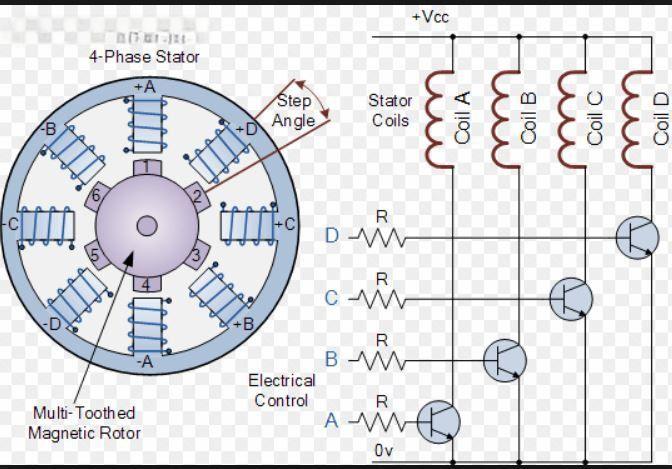
ステッピングモーターは、ステーター内に配置された一連の巻線によって磁場を発生させます。これらの磁場とローター(回転部品)との相互作用によって運動が生じます。通常、永久磁石または軟鉄片を用いて、ステーター巻線が特定の順序で駆動されると、ローターが段階的に動きます。
ステッピングモーターを制御するには、いくつかの重要な概念を理解する必要があります。
ステップ角:
ステップ角は、ローターが各ステップでどれだけ移動するかを定義します。例えば、ステッピングモーターのステップ角が1.8°の場合、モーターのローターは1パルスごとに1.8°移動します。
モーターの総回転数は、360°をステップ角で割ることで求められます。例えば、ステップ角が1.8°のモーターでは、1回転するのに200ステップかかります(360° / 1.8° = 200ステップ)。
ステップモード:
ステッピングモーターは、コイルへの通電方法に応じて、さまざまなモードで駆動できます。
- フルステップ:モーターは、各ステップでローターをフルステップ角だけ動かすように通電されます。
- ハーフステップ:モーターはより小さなステップで動作し、よりスムーズな動きと高い分解能を実現します。
- マイクロステップ:これは最も高度なモードで、モーターのコイルに通電することでローターを非常に小さなステップで動かします。
- これにより、非常に細かい制御とスムーズな動きを実現します。
位相とコイル:
- ステッピングモーターは複数の相、つまりコイルで構成されています。これらのコイルに正しい順序で通電することで、ローターは段階的に移動させられます。
- 例えば、2相ステッピングモーターでは、コイルに特定の順序で通電することで発生する磁場により、ローターは明確なステップで回転します。
ステッピングモーターの制御方法
ステッピングモーターの制御方法はいくつかあり、それぞれに長所と短所があります。どの方法を選択するかは、アプリケーション、必要な精度、利用可能なハードウェアによって異なります。
マイクロコントローラ(例:Arduino)の使用
ステッピングモーターは、多くの場合、マイクロコントローラによって制御されます。マイクロコントローラは必要なパルス信号を生成し、モーターのドライバ回路に送信することで、コイルに流れる電流を制御します。この手法は、小型機械やDIYプロジェクトでよく用いられます。
例えば、Arduinoでは、AccelStepperなどのライブラリを使用してステッピングモーターを制御できます。Arduinoは一連のデジタルパルスをモータードライバに送信し、ドライバは適切な電圧と電流をモーターコイルに供給します。
基本的なArduinoコード例:
#include
<Stepper.h>
const int stepsPerRevolution = 200; // モーターの仕様に合わせて変更してください
// ステッパーライブラリを1回転あたりのステップ数で初期化します
ステッパー stepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
// モーターの速度(RPM)を設定
stepper.setSpeed(60);
}
void loop() {
// モーターを100ステップ前進させる
stepper.step(100);
delay(1000);
// モーターを100ステップ後退させる
stepper.step(-100);
delay(1000);
}
専用ステッピングモータードライバーの使用
ステッピングモーターのコイルに流れる電流は、A4988やDRV8825などのステッピングモータードライバーと呼ばれる専用回路を使用して制御できます。これらのドライバーは、ステッピングモーターに必要な大電流に対応できるだけでなく、より滑らかな動作を実現するマイクロステッピング機能も備えています。
例えば、Arduinoやその他のマイクロコントローラをA4988などのドライバと組み合わせることで、パルス信号を介してステッピングモーターを制御できます。マイクロコントローラが信号を生成し、ドライバがその信号に従ってモーターのコイルを制御します。
ArduinoとA4988ドライバの基本的な配線:
- VDDをArduino 5Vに接続
- GNDをArduino GNDに接続
- STEPをArduinoデジタルピン(例:ピン3)に接続
- DIRをArduinoデジタルピン(例:ピン4)に接続
- VMOTをモーター電源に接続
- M0、M1、M2ピン(マイクロステップ設定用)(オプション)
コンピュータまたはPLC(プログラマブルロジックコントローラ)の使用
産業用途やより複雑な用途では、ステッピングモーターは制御ソフトウェアを実行するコンピュータまたはPLCによって制御されます。この構成は、複数のモーターや精密な動きに対する高度な制御が必要なCNCマシンや自動化システムで一般的です。
電源による制御
ステッピングモーターの制御では、ドライバに加えて電源も重要なコンポーネントです。モーターとドライバの電圧と電流の仕様は一致している必要があります。不適切な電源供給は、過熱、トルクの低下、モーターの損傷につながる可能性があります。
制御信号とタイミング
- パルスレート(周波数):パルス信号の周波数によってモーターの速度が決まります。動きが速いほど周波数が高くなり、動きが遅いほど周波数が低くなります。
- 方向制御:多くのドライバでは、DIRピンが回転方向を制御します。このピンの状態(HIGHまたはLOW)を変えると、モーターの回転方向が逆になります。
ステッピングモーター制御概要チャート
| 制御方法 | 利点 | 欠点 |
| マイコン | 低コスト、シンプル、プログラムが簡単 | 電力処理能力が制限される |
| 専用ステッパードライバ | 信頼性が高い、高電力対応、マイクロステップ対応 | 配線が複雑、追加コストがかかる |
| PLC/コンピュータ制御 | 高精度、大規模システムに対応可能 | 高価、設定が複雑 |
| 電源制御 | 基本的、シンプルな用途に対応 | 機能が制限される、高度な制御は不可 |
ステッピングモーターを制御する際の重要な考慮事項
- 電力要件:ステッピングモーターは、特に負荷がかかっているときや高速で動作しているときには、通常のDCモーターよりも多くの電力を必要とします。損傷を防ぐため、モーターの要件に適合した電源を常に使用してください。
- 放熱:ステッピングモーターは、特に高負荷時には熱くなる傾向があります。モーターを長時間動作させる場合は、適切な換気を確保するか、ヒートシンクやファンの追加を検討してください。
- マイクロステップ:フルステッピングではモーターのトルクは最大になりますが、マイクロステップではトルクは低下しますが、よりスムーズな動作と優れた精度が得られます。制御方法を選択する際には、これらのトレードオフを理解することが重要です。
結論
ステッピングモーターの挙動を理解し、アプリケーションに最適な制御戦略を選択することは、制御に不可欠です。Arduinoのようなマイクロコントローラ、A4988のような専用ドライバ、あるいはより高度な産業用システムなど、どのようなシステムを使用しても、ステッピングモーターはフィードバックシステムを必要とせずに位置と速度を優れた制御できます。電源、ドライバ、制御信号の適切な組み合わせを選択することで、プロジェクトにおいて高精度で信頼性の高い動作を実現できます。
