サーボモーターは、オートメーション、ロボット工学、CNC工作機械、製造業など、多くのアプリケーションにおいて不可欠な部品です。最適な性能、コスト効率、そしてエネルギー効率を確保するには、適切なサイズのサーボモーターを選択することが不可欠です。
このガイドでは、サーボモーターのサイズ、仕様、そしてアプリケーションに最適なサーボモーターの選び方について詳しく説明します。
サーボモーターとは?
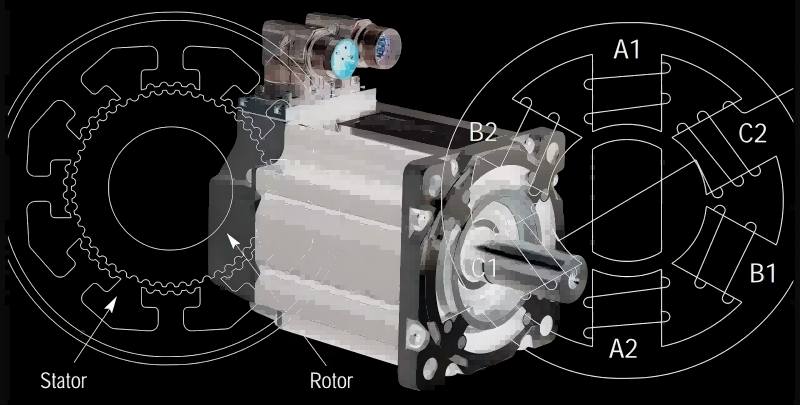
サーボモーターは、加速度、速度、角度位置を正確に制御できるリニアアクチュエータまたはロータリーアクチュエータの一種です。モーターとフィードバックセンサーが結合され、閉ループ制御を実現します。精密な位置決めと速度制御を必要とする業界では、サーボモーターが広く使用されています。
主な特長:
- 高精度
- 素早い応答時間
- コンパクトな設計
- トルクと速度をカスタマイズ可能
サーボモーターのサイズはなぜ重要なのでしょうか?
サーボモーターのサイズは、トルク、速度、そして負荷時の性能に影響を与えます。不適切なサイズのモーターを選択すると、次のような問題が発生する可能性があります。
- 小型化:トルク不足、過熱、寿命の低下。
- 大型化:不必要なコスト、設置スペースの増大、非効率。
最適なパフォーマンスを確保するには、モーターのサイズ分類と仕様を理解することが重要です。
サーボモーターのサイズによる分類
サーボモーターには、小型電子機器用の小型モーターから産業機械に使用される大型モーターまで、様々なサイズがあります。サーボモーターのサイズは、以下のようないくつかの要因によって決まります。
- トルク要件:負荷を移動または保持するために必要なトルクの量。
- 速度要件:モーターの動作に必要な速度。
- 負荷慣性:負荷の動きの変化に対する抵抗。
- 用途タイプ:モーターを位置決め、連続動作、またはその両方に使用するかどうか。
サーボモーターのサイズ選定における重要な要素
サーボモーターの適切なサイズ選定には、アプリケーションとモーターの性能を理解することが不可欠です。主な考慮事項は以下のとおりです。
トルク
サーボモーターの定格はトルク出力で、通常はニュートンメートル(Nm)またはオンスインチ(oz-in)で表されます。アプリケーションに必要なトルクによってモーターのサイズが決まります。
- 連続トルク:モーターが過熱することなく連続的に出力できるトルク。
- ピークトルク:モーターが短時間に出力できる最大トルク。
速度
モーターの速度は通常、毎分回転数(RPM)で測定されます。高速動作を必要とするアプリケーションでは、より小型で軽量、かつ高回転数(RPM)のモーターが必要になる場合があります。
出力
出力は、トルクと角速度の積で算出されます。より高い出力を必要とするアプリケーションでは、より大きなサーボモーターが必要になる場合があります。
外形寸法
サーボモーターには様々な外形寸法があり、多くの場合、フレームサイズによって決まります。一般的なフレームサイズは、NEMA(全米電機工業会)サイズなどの業界標準に基づいています。
一般的なサーボモーターのサイズ
一般的なサーボモーターのサイズと、その代表的な用途を以下に示します。
| サーボモーターサイズ | トルク範囲 | スピード範囲 | 代表的な用途 |
| マイクロ | < 0.1 Nm | 1000–5000 RPM | 小型ロボット、ドローン、ホビープロジェクト |
| 小型 | 0.1–1 Nm | 1000–6000 RPM | 医療機器、3Dプリンター、CNCマシン |
| 中型 | 1–10 Nm | 500–3000 RPM | 産業用ロボット、包装機械 |
| 大型 | > 10 Nm | 100–1500 RPM | 重機、コンベヤシステム |
トルク vs. 速度:トレードオフを理解する
サーボモーターは、トルクと速度の間でトレードオフの関係にあります。モーターの回転速度が速いほど、出力できるトルクは少なくなります。逆に、高いトルクを出力するモーターは、最高速度が低くなる傾向があります。この関係は、通常、トルク-速度曲線で表されます。
トルク-速度曲線の例
以下は、サーボモーターのトルク-速度曲線の一般的な表現です。
- 領域1:低速域で連続トルクを発生。
- 領域2:短時間のピークトルクを発生。
- 領域3:高速域でトルクを低下。
| スピード (RPM) | トルク (Nm) |
| 500 | 10 |
| 1000 | 8 |
| 2000 | 6 |
| 3000 | 4 |
| 4000 | 2 |
サイズ選定例:CNC工作機械用サーボモーターの選定
以下の要件を満たすCNC工作機械を設計しているとします。
- 負荷慣性モーメント: 0.02 kg·m²
- 回転速度: 1500 RPM
- 連続トルク: 3 Nm
- ピークトルク: 6 Nm
これらのパラメータを使用すると、次のようになります。
- 速度範囲の選択:1500 RPM以上の回転数に対応するモーターを選択してください。
- トルク要件の確認:連続トルク3 Nm、ピークトルク6 Nmのモーターを選択してください。
- 慣性の一致:安定性を確保するため、モーターの慣性が負荷の慣性と一致するか、わずかに高いことを確認してください。
この例では、中型サーボモーターが適していると考えられます。
NEMAサーボモーターサイズ表
選定プロセスを簡素化するために、一般的なサーボモーターのサイズと仕様を示す一般的な表を以下に示します。
| フレームサイズ | 連続トルク (Nm) | ピークトルク (Nm) | スピード (RPM) | 用途 |
| NEMA 17 | 0.2–0.5 | 0.5–1.0 | 3000–5000 | 小型ロボット、3Dプリンター |
| NEMA 23 | 0.5–2.0 | 2.0–4.0 | 1000–3000 | CNCマシン、包装機械 |
| NEMA 34 | 2.0–8.0 | 8.0–16.0 | 500–1500 | 産業オートメーション、ロボット |
| カスタム大型 | > 8.0 | > 16.0 | 100–500 | コンベヤーベルト、重量物の持ち上げ |
適切なサーボモーターのサイズを選択する手順
- アプリケーション要件の定義:トルク、速度、負荷慣性を決定します。
- モーター仕様の確認:利用可能なモーターの仕様と要件を比較します。
- 物理的制約の考慮:モーターが機械で動作することを確認するには、物理的寸法を確認します。
- シミュレーションの実行:シミュレーションツールまたはソフトウェアを使用して、想定される動作条件下でのモーターの性能を検証します。
- 環境要因の評価:放熱、振動、取り付け要件を考慮します。
適切なサーボモータのサイジングの利点
- 効率性:エネルギーの無駄と過熱を回避します。
- 費用対効果:初期コストと運用コストを削減します。
- 信頼性:故障のない長期運用を保証します。
- 性能:精密な制御と精度を実現します。
サーボモータ設計の将来動向
技術の進化に伴い、サーボモーターはより小型、より強力、そしてよりエネルギー効率の高いものになっています。主なトレンドは以下の通りです。
- 小型化:小型アプリケーション向けに高トルクのマイクロサーボモーターを搭載。
- 統合:プラグアンドプレイ機能を実現する内蔵コントローラー。
- エネルギー効率:消費電力を削減する設計の改良。
結論
適切なサーボモーターのサイズを選択することは、効率的で費用対効果の高いシステムを設計する上で重要なステップです。サイズ、トルク、アプリケーション要件の関係を理解することで、最適なパフォーマンスを確保できます。負荷要件、環境条件、システムの互換性などの要素を考慮し、信頼できるサーボモーターメーカーに相談することで、お客様固有のニーズを満たすサーボモーターを選定できます。