Bürstenlose Gleichstrommotoren (BLDC) mit Außenläufermotor werden aufgrund ihres hohen Drehmoment-Gewichts-Verhältnisses und ihres hohen Wirkungsgrades häufig in Drohnen, RC-Flugzeugen, Hobby-Robotik und E-Bikes eingesetzt. Eine entscheidende Komponente jedes Systems mit BLDC-Motoren ist der elektronische Drehzahlregler (ESC) – die Schnittstelle zwischen den Steuersignalen (wie PWM oder anderen Protokollen) und der dem Motor zugeführten Leistung.
Die Wahl des richtigen Reglers erfordert ein Verständnis seiner Funktionsweise, der unterstützten Ansteuerungsmethoden (PWM vs. FOC), der Spannungs- und Stromstärken sowie weiterer Merkmale wie Telemetrie, Kühlung und Firmware. In diesem Leitfaden erfahren Sie mehr über:
- Funktionsprinzipien des ESC
- Regelungsmethoden: PWM vs. FOC
- Spannungsbetrachtungen
- Aktuelle Nennwerte und Dauerstrom vs. Spitzenstrom
- Effizienz und Wärmemanagement
- Zusätzliche Funktionen
- Auswahlcheckliste und Vergleichstabellen
- Beispielhafte ESC- und Motorpaarungen
- Zusammenfassung und Empfehlungen
ESC-Bedienung: Grundlagen
Ein ESC (Electronic Speed Controller) empfängt ein Niederspannungs-Steuersignal (z. B. PWM von einem Flugcontroller) und schaltet in einer bestimmten Reihenfolge Hochspannungs-Gleichstrom an die dreiphasigen Wicklungen eines BLDC-Motors, um diesen zu drehen. Dies beinhaltet:
- Hochgeschwindigkeits-MOSFET-Schaltung zur Ansteuerung von Phasen
- Kommutierungslogik zur Entscheidung, welche Phasen mit Strom versorgt werden sollen.
- Positionsrückmeldung (Gegen-EMK oder Sensoren)
- Schutzschaltungen gegen Überspannung, Überstrom und Unterspannungsabschaltung (LVC)
Wichtigste Kennzahlen:
- Nennspannung (V): Maximale Batteriespannung, die der Regler verarbeiten kann
- Dauerstrom (A): Stromstärke, die der ESC unbegrenzt aufrechterhalten kann, begrenzt durch die Kühlung
- Impulsstrom (A): Kurzzeitige Hochstromfähigkeit (z. B. 10 Sekunden)
- Regelungsmethode: PWM (sechsstufig) oder FOC (feldorientierte Regelung)
- Firmware: z. B. BLHeli, KISS, VESC, spezielle FOC-Firmware
Regelungsmethoden: PWM vs. FOC
PWM-/„Sechs-Stufen“-Steuerung
Traditionelle Methode – der ESC steuert den Motor mit sechsstufiger Kommutierung.
Einfacher, geringerer Rechenaufwand, aber:
- Erzeugt eine stufenförmige Wellenform – mehr Welligkeit und Drehmomentwelligkeit.
- Keine optimale Stromvektorsteuerung → etwas weniger effizient, verrauschter.
FOC (Feldorientierte Regelung)
Setzt eine Vektorsteuerung zur Motoransteuerung basierend auf der Rotor-/Statorfeldorientierung in Echtzeit um.
Liefert:
- Extrem gleichmäßiges Drehmoment und Rotation.
- Geringeres elektrisches Rauschen, geringere Motorerwärmung.
- Höherer Wirkungsgrad, insbesondere bei niedrigen Drehzahlen und Teillasten.
Erfordert mehr Rechenleistung und manchmal Strom- und Spannungsmessung (wie bei VESC-basierten ESCs).
Vergleichstabelle
| Besonderheit | PWM (Sechsstufig) | FOC (Feldorientierte Regelung) |
| Kommutierung | Sechs Schritte | Vektor (sinusförmig) |
| Glätte | Mittel; Drehmomentwelligkeit | Sehr gleichmäßiger Lauf, minimales Drehmomentwelligkeit |
| Effizienz | Gut, weniger bei niedrigen Drehzahlen | Hervorragend über einen breiten Drehzahlbereich |
| Geräusch (hörbar) | Höher (summend) | Leiser |
| Komplexität / Kosten | Untere | Höher (erfordert fortschrittlichen Mikrocontroller, Sensoren) |
| Firmware-Beispiele | BLHeli, KISS (non‐FOC) | VESC, BLHeli_S (FOC), benutzerdefiniertes FOC |
Spannungsbetrachtungen
Die Nennspannung des Reglers muss den Spannungsanforderungen von Batterie und Motor entsprechen:
- Gängige ESC-Nennwerte: 2S bis 6S LiPo (7,4 V bis 22,2 V) oder in E-Bike-/Hobby-Qualität: 24 V, 36 V, 48 V usw.
- Sicherheitsmarge ist unerlässlich – wählen Sie einen Regler mit einer etwas höheren Nennspannung als der Nennbatteriespannung, um Spannungsspitzen und Überschwingen aufzufangen.
Spannungs-Batterie-Beispiele
| Anwendung | Akku-Typ | Nennspannung | ESC-Spannungsnennwert |
| Mini-Drohne | 3 S LiPo | ≈11,1 V | 3 S–4 S (12 V–16,8 V) |
| FPV-Renndrohne | 4 S LiPo | ≈14,8 V | 4 S–5 S (16,8 V–21 V) |
| E-Bike / Roller | Li-Ionen-Akku | ≈36V | 36 V–48 V |
| größerer E-Rover | Li-Ionen-Akku | ≈48V | 48 V–60 V |
Stellen Sie stets sicher, dass die maximale Spannungsangabe des Reglers die Spitzenspannung unter Last übersteigt (vollständig geladener LiPo-Akku ~4,2 V pro Zelle).
Aktuelle Nennwerte: Dauerstrom vs. Impulsstrom
Die Auswahl des aktuellen Ratings ist vielleicht der wichtigste Schritt.
- Dauerstrom: Maximalstrom, den der Regler auf unbestimmte Zeit verkraften kann (typischerweise bei ausreichender Kühlung).
- Impulsstrom: Kurzzeitbelastbarkeit, z. B. 5–10 Sekunden.
Vergleichen Sie stets die Nennleistung des Reglers mit der zu erwartenden Stromaufnahme Ihres Motors unter Ihren Betriebsbedingungen.
Beispielhafte Motorstromdaten
Nehmen wir an, Außenläufer-BLDC-Motorhat folgende Stromaufnahmen gemessen:
| Lastzustand | Stromspannung | Aktueller Stromverbrauch |
| Leerlauf (ohne Last) | 12 V | 0,5 A |
| Schweben / leichte Last | 12 V | 10 A |
| Maximale Drosselklappe / schwer | 12 V | 20 A |
| Stall | 12 V | 25 A |
In diesem Fall sollte der ESC Folgendes tun:
- Halten Sie mindestens 20 A kontinuierlich aufrecht.
- 25-A-Burst für Sicherheit und Startvorgang
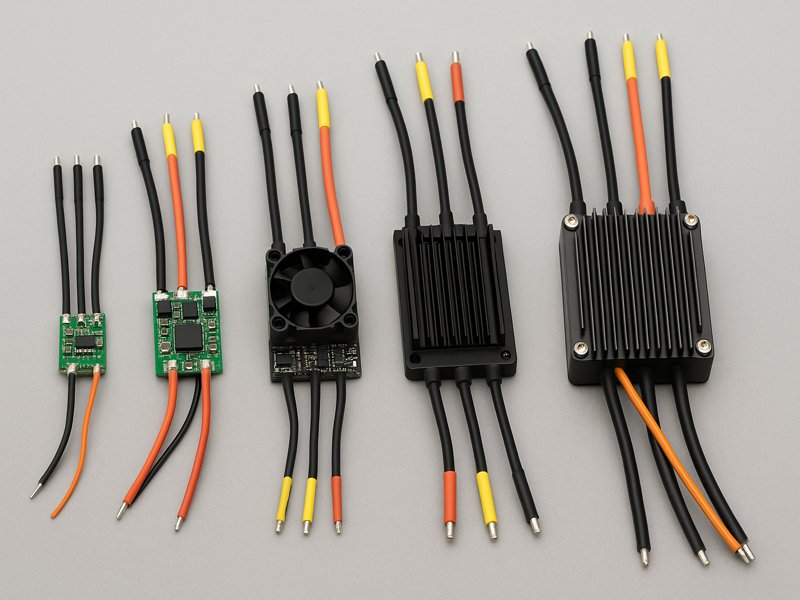
Tabelle der ESC-Strombelastbarkeitswerte (Beispielmodelle)
| ESC-Modell | Spannung (S LiPo) | Gleichstrom | Impulsstrom | Steuerungstyp |
| ESC-A (Budget) | 2–4 S | 20 A | 25 A (5 s) | PWM |
| ESC-B (mittlerer Bereich) | 3–6 S | 30 A | 40 A (10 s) | PWM / FOC |
| ESC-C (High-End) | 4–6 S | 40 A | 60 A (10 s) | Nur FOC |
| ESC-D (E-Bike-Stil) | 10S (~36V) | 100 A | 150 A (10 s) | FEUER |
Effizienz & Wärmemanagement
Hitze ist der größte Feind Ihres Reglers. Effizienz und Kühlstrategien beeinflussen Leistung und Lebensdauer maßgeblich.
Effizienzunterschiede: FOC-ESCs arbeiten unter Teillast oft 2–5 % effizienter. In einem 12-V-System mit 20 A (240 W) Stromaufnahme entspricht eine Einsparung von 5 % einer deutlichen Reduzierung der Wärmeentwicklung um 12 W.
Kühlmethoden:
- Passiv: Aluminium-Kühlkörper, Luftstrom
- Aktiv: integrierte oder zusätzliche Lüfter
- Flüssigkeitskühlung: für Hochleistungsanlagen
| ESC-Typ | Kühlmethode | Typischer Temperaturanstieg | Kommentar |
| Budget PWM ESC | Passive Kühlrippen + Luftstrom | +30 °C | Möglicherweise ist eine externe Luftzufuhr erforderlich. |
| Mittelklasse-FOC-Regler | Kühlrippen + kleiner Ventilator | +20 °C | Bessere Leistung bei hoher Last |
| Hochwertiger FOC-Regler | Große Kühlrippen + Ventilator | +10 °C | Seltene thermische Drosselung |
Weitere zu berücksichtigende Merkmale
Telemetrieunterstützung – Möglichkeit, Drehzahl, Stromstärke, Spannung und Temperatur an Ihren Flugcontroller zu melden.
BEC (Battery Eliminator Circuit) – integrierter 5 V/6 V-Regler zur Stromversorgung von Funkgerät/Empfänger:
Nennstrom in Ampere: z. B. 2 A, 3 A.
Programmierbarkeit – über USB-Verbindung, Bluetooth oder dedizierte Cursor-Potentiometer-Schnittstelle.
Bremsunterstützung – nützlich bei E-Bikes und Robotern.
Anlaufmodi – Sanftanlauf, aktives Bremsen, Bremsen bis zum Stillstand, Motor-Timing-Anpassung.
Firmware-Unterstützung:
- BLHeli: Standard bei Multikopter-Drohnen, unterstützt üblicherweise sowohl PWM- als auch FOC-Varianten.
- VESC-Firmware: weit verbreitet in E-Skates, Robotik, fortgeschrittenem FOC-Tuning
ESC-Auswahl-Checkliste & Vergleich
ESC-Auswahl-Checkliste
- Spannungsverträglichkeit: Maximale Reglerspannung > Maximale Batteriespannung
- Aktuelle Kapazität: Dauerhaft ≥ stationärer Stromverbrauch; Impuls ≥ Anlauf-/Blockierstrom und Spitzenstrom
- Regelungsmethode: PWM bei Kostensensibilität; FOC für Effizienz, Rauschen und Glätte
- Kühllösung: Sicherung des Wärmepfads entsprechend dem Motorlastprofil
- Gewünschte Funktionen: Telemetrie, BEC, Programmierung, Bremsen, Anfahrverhalten
- Formfaktor und Gewicht: wichtig für Drohnen und mobile Plattformen
- Firmware- und Community-Support: Verfügbarkeit von Tuning-Optionen, Updates und Dokumentation
Beispielvergleichstabelle
| ESC-Modell | Spannung | Fortsetzung | Impulsstrom | Steuerungstyp | Kühlung | Telemetrie | BEC | Anmerkungen |
| ESC-A | 2–4 S | 20 A | 25 A | MLI | Passive Flossen | NEIN | 5V/2A | Budget-Drohnen-ESC |
| ESC-B | 3–6 S | 30 A | 40 A | PWM/FOC | Kleiner Ventilator | Ja | 5V/3A | Mittelklasse, multikopterfähig |
| ESC-C | 4–6 S | 40 A | 60 A | FEUER | Ventilator + Flossen | Ja | 6V/3A | Rennsporttauglich, geschmeidiges FOC |
| ESC-D (E-Bike) | 10 S | 100 A | 150 A | FEUER | Große Kühlrippen + Ventilator | Ja | NEIN | E-Bike-Systeme mit hohem Drehmoment |
Beispielpaarungen: Motor & Regler
Beispiel 1: Mini-Renndrohne
- Motor: Baugröße 2205, KV 2300, Stromaufnahme bei Vollgas mit 4S-Batterie ca. 15 A
- Akku: 4 S LiPo (nom. 14,8 V, Spitze ~16,8 V)
- ESC: Benötigt ≥ 20 A Dauerstrom, ~25 A Impulsstrom, 5 S für Überlastung ausgelegt; stufenlose Regelung → ESC-B (3–6 S, 30 A Dauerstrom, 40 A Impulsstrom, PWM/FOC, kleiner Lüfter)
Beispiel 2: E-Bike-Antriebsmotor
- Motor: Außenläufer-Getriebenabenmotor, zieht 60 A in der Spitze, 30 A im Fahrbetrieb mit 36 V Batterie (10 S)
- Batterie: Nennspannung 36 V (Spitzenspannung ~42 V)
- ESC: Benötigt ≥ 30 A Dauerstrom, ≥ 60 A Impulsstrom; FOC wird für gleichmäßigen Betrieb und Regeneration bevorzugt. ESC-D (10 s, 100 A Dauerstrom) ist geeignet.
Beispiel 3: RC-Boot mit schwerer Ladung
- Motor: Großer Außenläufer, zieht 25 A Dauerstrom, 50 A Spitzenstrom bei 6 S
- Akku: 6 S LiPo (22,2 V nom, 25,2 V peak)
- ESC: Benötigt ≥ 30 A Dauerstrom, ≥ 60 A Spitzenstrom; FOC sorgt für einen leiseren Betrieb in Wasserfahrzeugen. Wählen Sie ESC-C (4–6 s, 40 A Dauerstrom, 60 A Spitzenstrom, FOC).
Hinweise zum Abgleich von Regler- und Motorspezifikationsdaten
Den ungefähren Motorstrom können Sie anhand des Motordatenblatts oder durch Messung mit einem Drehzahlmesser und einem Wattmeter berechnen.
Die Motor- und Reglerwärme muss innerhalb sicherer Grenzen liegen – überwachen Sie die Komponententemperaturen während der ersten Versuche.
Beachten Sie den Spannungsabfall unter Last – die Zellenspannung kann von 4,2 V auf 3,7 V oder darunter absinken; wählen Sie die ESC-Reserve entsprechend.
Durch ein Upgrade Ihres Reglers (und die Nutzung von FOC) können Sie die Akkulaufzeit verbessern, die Wärmeentwicklung reduzieren und das Ansprechverhalten des Gashebels verbessern.
Zusammenfassung & Empfehlungen
PWM-Regler sind kostengünstig und für viele Anwendungen völlig ausreichend – wählen Sie ein Modell mit ausreichender Spannungs- und Stromstärke.
FOC-Regler sind den Aufpreis wert, da sie einen reibungsloseren und effizienteren Betrieb ermöglichen – insbesondere bei Robotern, E-Bikes, Booten und Anwendungen, die Geräusche oder Präzision erfordern.
Um Zuverlässigkeit und thermische Reserve zu gewährleisten, sollten Spannung und Stromstärke stets überdimensioniert werden.
Die erforderlichen Funktionen (Telemetrie, BEC, Bremsen) sollten Ihren Anforderungen an Steuerungssystem und Komfort entsprechen.
Verwenden Sie die obenstehenden Beispielpaarungstabellen als Vorlagen für die Auswahl von ESCs für Ihre Outrunner-BLDC-Projekte.
