現代の多くの自動化システム、ロボット工学、CNC装置、精密アプリケーションにおいて、サーボモーターは不可欠な部品です。その設計と製造技術により、位置、速度、トルクを極めて高精度に制御できます。
サーボモーターの内部構造を理解することは、特定のアプリケーションに適したモーターを選択する上で重要です。この記事では、サーボモーターの構造、構成部品、そしてそれぞれの機能について詳しく見ていきます。
サーボモーターとは?
サーボモーターと呼ばれる電気機械装置は、トルク、速度、角度位置を正確に制御できます。ロボット工学、CNCマシン、自動化システム、そして高性能なモーション制御を必要とするアプリケーションで広く利用されています。標準的なモーターとは異なり、サーボモーターは通常、フィードバックシステム(エンコーダなど)と統合されており、性能を継続的に監視・調整することで、モーターが制御コマンドに従って動作することを保証します。
サーボモーターの主要部品
サーボモーターの構造は比較的複雑で、精密な制御を実現するために連携して動作する複数の重要な部品で構成されています。これらの部品は以下のとおりです。
- Stator
- ローター
- Feedback System (Encoder or Resolver)
- Controller
- Power Supply
各コンポーネントを詳しく見ていきましょう。
ステーター
サーボモーターのステーターは固定部品です。銅コイルが巻かれた積層鋼板で構成され、ACまたはDC電源に接続されます。これらの巻線に電気が流れると、ローターと相互作用する磁場が発生し、回転運動を生み出します。
- 機能:ACサーボモーターの場合、この磁場は交流電流によって生成されますが、DCサーボモーターの場合は、モーター巻線に供給される直流電流によって磁場が生成されます。
- 構造:ステーターは通常、渦電流によるエネルギー損失を低減する薄い電磁鋼板(積層板)で作られています。銅またはアルミニウムの巻線を使用することで、電気伝導性を最大限に高めることができます。
ローター
ローターは永久磁石(永久磁石型サーボモーターの場合)または電磁石(誘導型サーボモーターの場合)で構成されます。機械出力は、ローターが取り付けられたシャフトを介して負荷に伝達されます。
- 機能:ローターの役割は、ステーターの磁界内で回転することで電気エネルギーを機械エネルギーに変換することです。ローターの動きは、フィードバックシステムとコントローラによって精密に制御され、正確な動作を保証します。
- 構造:ブラシレスDC(BLDC)モーターの場合、ローターには永久磁石が取り付けられていますが、その配置は若干異なります。AC誘導モーターの場合、ローターは積層鉄心で構成される場合があります。
フィードバックシステム(エンコーダまたはレゾルバ)
サーボモーターの重要な部品の一つがフィードバックシステムです。これは、モーターの位置、速度、そして場合によっては回転方向を継続的に追跡するエンコーダまたはレゾルバで構成されています。コントローラはこのフィードバックを受け取り、モーターの動作を瞬時に変更します。
- 機能:フィードバックシステムの主な機能は、モーターの実際の性能に関する情報を提供することで、高精度な制御を実現することです。モーターが目標位置または速度から逸脱した場合、コントローラはこのフィードバックに基づいて調整を行い、モーターを目標設定点に戻します。
- フィードバックシステムの種類:
エンコーダー:ローターの位置と速度を測定する光学式または磁気式デバイスです。絶対位置(一定の位置値を示す)とインクリメンタル位置(相対位置の増加を示す)があります。
レゾルバ:高精度アプリケーションで使用される電気機械式デバイスで、ローターの位置に関する継続的なフィードバックを提供します。

コントローラ
コントローラはサーボモーターシステムの頭脳です。通常はコンピューター、モーションコントローラー、またはPLCから受信した制御信号を処理し、モーターにコマンドを送信します。コントローラは、所望の出力を得るために、デューティサイクルと入力電力を調整します。
- 機能:コントローラは、エンコーダまたはレゾルバからのフィードバックを解釈した後、それを意図した設定値と比較します。この情報に基づいてモーターにコマンドを送信し、電圧または電流を調整して速度、位置、トルクを制御します。
- 構成:コントローラは通常、複雑な制御アルゴリズム(PID制御など)を処理できるマイクロプロセッサまたはデジタル信号プロセッサ(DSP)で構成され、高い性能を実現します。
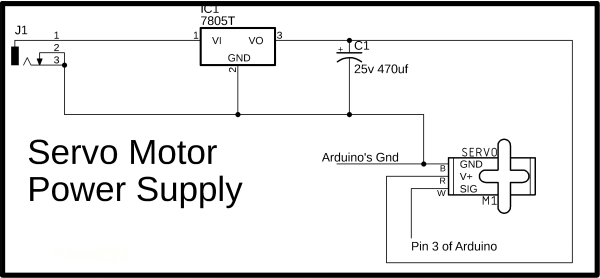
電源
ACサーボモーターでは通常、AC電源が使用されますが、DCサーボモーターではDC電源が使用されます。サーボモーターは高い精度と信頼性が求められるため、電源は電圧や電流の変動を最小限に抑えながら高電力を供給できる必要があります。
- 機能: 電源は、モーターとコントローラーに必要な電圧と電流を供給し、安定した動作と経済的なエネルギー利用を保証します。
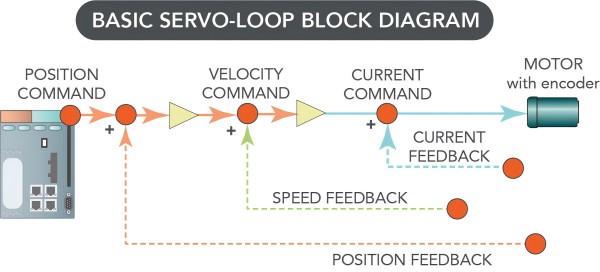
サーボモーターの動作原理
サーボモーターの動作原理を理解するには、以下の手順に従います。
- 入力信号:コントローラは、通常、所望の位置、速度、またはトルクを表す入力信号を受信します。
- フィードバック監視:フィードバックシステム(エンコーダまたはレゾルバ)は、ローターの実際の位置を継続的に監視します。
- 誤差計算:必要な位置または速度を決定するために、コントローラは入力信号とエンコーダまたはレゾルバの実際の位置(フィードバック)を比較します。
- 補正:コントローラは、意図した位置と実際の位置の間に差異がある場合、ステータ巻線に供給される電力を調整してローターの位置を修正します。
- 連続監視:コントローラはモーターを継続的に調整して精度を維持し、モーターが必要な設定値に到達して保持できるようにします。
サーボモーターの種類
サーボモーターは、設計と用途に基づいて様々な種類に分類されます。最も一般的な種類は以下のとおりです。
ACサーボモーター:
- 動作には交流(AC)を使用します。
- 同期ACモーター、永久磁石(PM)ACモーターなどに分類されます。
- ロボット工学、CNCマシン、産業オートメーションなどで頻繁に使用されます。
DCサーボモーター:
- 直流(DC)で動作し、スムーズで正確な動作を実現します。
- 低~中程度のトルクと速度が求められる用途でよく使用されます。
ブラシレスDC(BLDC)サーボモーター:
- ブラシレスDCモーターの一種。
- 高効率、低メンテナンス、長寿命を実現。
- 長寿命と高トルクが求められる用途に使用されます。
| 特徴 | ACサーボモーター | DCサーボモーター | BLDCサーボモーター |
| 電源 | 交流 (AC) | 直流 (DC) | 直流 (DC) |
| 効率 | 高い | 中程度 | 非常に高い |
| 速度制御 | フィードバックシステムによる精密制御 | 電圧変化による容易な制御 | 精密かつ滑らかな制御 |
| トルク | 中〜高 | 中程度 | 高い |
| 耐久性 | 非常に耐久性が高く堅牢 | メンテナンスがより多く必要 | 非常に耐久性が高く低メンテナンス |
| コスト | やや高価 | コスト効率が良い | 高価 |
| 応用分野 | 産業オートメーション、ロボット工学 | 小型家電、玩具、低電力タスク | 電気自動車、ドローン、医療機器 |
サーボモーターの利点
- 精密制御:精度と精密さが不可欠なアプリケーションは、サーボモーター設計の焦点です。フィードバックシステムにより継続的な調整が可能になり、モーターの軌道維持が確保されます。
- 高効率:サーボモーターは、需要に応じて電力入力を調整し、不要なエネルギー消費を回避するため、一般的に通常のモーターよりも効率が高くなります。
- 高トルク・速度制御:サーボモーターは、様々な速度で優れたトルク制御を提供するため、可変負荷アプリケーションに適しています。
- 長寿命:サーボモーター(特にブラシレスタイプ)は摩耗しやすい可動部品が少ないため、通常のモーターよりも長寿命です。
特定の用途に適したサーボモーターを選択するには、モーターの構造を理解する必要があります。サーボモーターメーカーは、位置、速度、トルクを正確に制御するために、複数の部品が連携して動作する非常に複雑なデバイスを設計します。ステーター、ローター、フィードバックシステム、コントローラー、電源などの部品がどのように相互作用するかを理解することで、エンジニアや技術者はモーターの能力をより適切に評価し、様々な業界での使用を最適化することができます。自動化とロボット工学の進歩に伴い、サーボモーターは精度と効率性の向上においてますます重要になります。