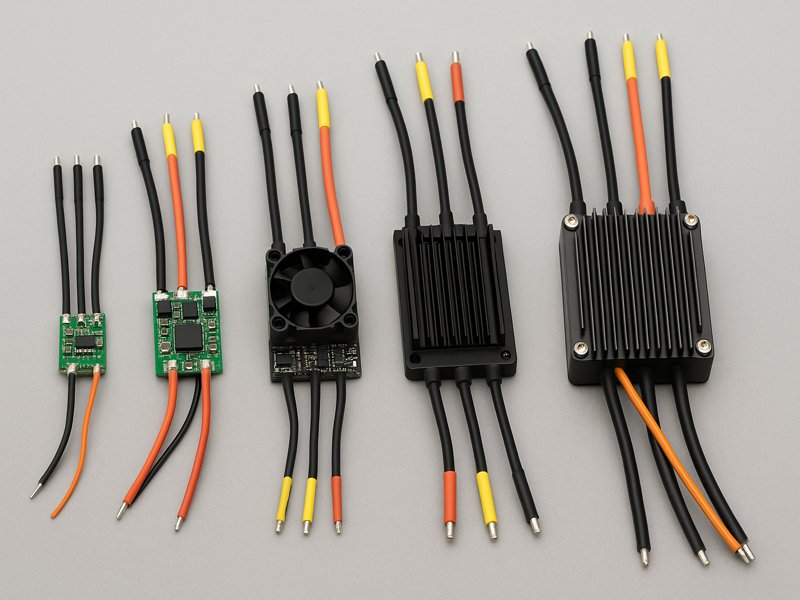
Outrunner BLDC(ブラシレスDC)モーターは、高いトルク対重量比と効率性により、ドローン、RC航空機、ホビーロボット、電動自転車などで広く使用されています。BLDCモーターを使用するあらゆるシステムにおいて重要なコンポーネントとなるのが、電子速度コントローラー(ESC)です。ESCは、制御信号(PWMやその他のプロトコルなど)とモーターに供給される電力との間のインターフェースです。
適切なESCを選択するには、ESCの動作原理、サポートされる制御方式(PWM vs FOC)、電圧と電流の定格、テレメトリ、冷却、ファームウェアなどのその他の機能を理解する必要があります。このガイドでは、以下の内容について説明します。
- ESCの動作原理
- 制御方式:PWM vs FOC
- 電圧に関する考慮事項
- 電流定格と連続電流 vs ピーク電流
- 効率と熱管理
- 追加機能
- 選択チェックリストと比較表
- ESCとモーターの組み合わせ例
- まとめと推奨事項
ESCの操作:基本
ESCは、低電圧の制御入力(フライトコントローラーからのPWMなど)を受け取り、高電圧のDC電圧を特定のシーケンスでBLDCモーターの三相巻線に切り替えて回転させます。これには以下の手順が含まれます。
- 高速MOSFETスイッチングによる相駆動
- どの相に電力を供給するかを決定する整流ロジック
- 位置フィードバックのためのセンシング(逆起電力またはセンサー)
- 過電圧、過電流、低電圧遮断(LVC)保護回路
主な指標:
- 定格電圧 (V): ESCが処理できる最大バッテリー電圧
- 連続電流 (A): ESCが無期限に供給できる電流(冷却によって制限されます)
- バースト電流 (A): 短時間の高電流出力(例: 10秒)
- 制御方式: PWM(6段階)またはFOC(フィールド指向制御)
- ファームウェア: 例: BLHeli、KISS、VESC、専用FOCファームウェア
制御方法: PWM vs FOC
PWM / 「6段階」制御
従来の方式 – ESCは6段階整流でモーターを駆動します。
よりシンプルで計算負荷は少ないですが、以下の欠点があります。
- ステップ状の波形を生成するため、リップルとトルクリップルが増加します。
- 最適な電流ベクトル制御が行われないため、効率が若干低下し、ノイズが増加します。
FOC(ベクトル制御)
リアルタイムのローター/ステータの磁界方向に基づいてモータを駆動するベクトル制御を実現します。
特長:
- 極めてスムーズなトルクと回転。
- 電気ノイズが少なく、モーターの発熱も抑えられます。
- 特に低回転時および部分負荷時において、高い効率を実現します。
より高い処理能力と、場合によっては電流および電圧の検知 (VESC ベースの ESC など) が必要になります。
比較表
| 特徴 | PWM(6ステップ) | FOC(フィールド指向制御) |
| コミュテーション | 6ステップ | ベクトル制御(正弦波) |
| スムーズさ | 中程度;トルクリップルあり | 非常にスムーズ、トルクリップル最小 |
| 効率 | 良好だが低回転では低下 | 幅広い回転数範囲で優秀 |
| 騒音(可聴域) | 高め(ブーン音) | より静か |
| 複雑さ/コスト | 低い | 高い(高性能マイコン・センサーが必要) |
| ファームウェア例 | BLHeli, KISS(非FOC) | VESC, BLHeli_S(FOC), カスタムFOC |
電圧に関する考慮事項
ESCの電圧定格は、バッテリーとモーターの電圧要件と一致する必要があります。
- 一般的なESCの定格:2S~6S LiPo(7.4 V~22.2 V)、または電動自転車/ホビーグレード:24 V、36 V、48 Vなど。
- マージンが重要です。電圧スパイクやオーバーシュートに対応するため、公称バッテリー電圧よりわずかに高い定格のESCを選択してください。
電圧 – バッテリーの例
| 応用分野 | バッテリータイプ | 公称電圧 | ESC電圧定格 |
| ミニドローン | 3S LiPo | 約11.1 V | 3S–4S (12 V–16.8 V) |
| FPVレーシングドローン | 4S LiPo | 約14.8 V | 4S–5S (16.8 V–21 V) |
| Eバイク/スクーター | リチウムイオンパック | 約36 V | 36 V–48 V |
| 大型Eローバー | リチウムイオンパック | 約48 V | 48 V–60 V |
ESC の最大電圧定格が負荷時のピーク電圧(完全に充電された LiPo ではセルあたり約 4.2 V)を超えていることを常に確認してください。
電流定格:連続電流 vs. バースト電流
電流定格の選択はおそらく最も重要な部分です。
- 連続電流:ESCが無期限に処理できる最大電流(通常は適切な冷却を行なった場合)。
- バースト電流:短時間定格(例:5~10秒)。
必ずESCの定格と、ご使用のモーターの動作条件における予想電流消費量を比較してください。
モーター電流データの例
アウトランナーBLDCモーターの測定電流消費量が以下の通りであると仮定します。
| 負荷条件 | 電圧 | 電流消費 |
| アイドル(無負荷) | 12 V | 0.5 A |
| ホバリング/軽負荷 | 12 V | 10 A |
| 最大スロットル/重負荷 | 12 V | 20 A |
| ストール | 12 V | 25 A |
この場合、ESC は次のことを行う必要があります。
- 少なくとも20Aの連続電流に耐える
- 安全と起動のために25Aのバースト電流に耐える
ESC電流定格表(モデル例)
| ESCモデル | 電圧(S LiPo) | 連続電流 | バースト電流 | 制御方式 |
| ESC-A(低価格) | 2–4 S | 20 A | 25 A(5秒) | PWM |
| ESC-B(中価格帯) | 3–6 S | 30 A | 40 A(10秒) | PWM / FOC |
| ESC-C(高性能) | 4–6 S | 40 A | 60 A(10秒) | FOCのみ |
| ESC-D(Eバイク用) | 10S(約36 V) | 100 A | 150 A(10秒) | FOC |
効率と熱管理
熱はESCにとって最大の敵です。効率と冷却戦略は、パフォーマンスと寿命に大きく影響します。
効率の違い:FOC ESCは、部分負荷時に約2~5%高い効率で動作することがよくあります。20A(240W)の12Vシステムでは、5%の効率向上は12Wの発熱削減に相当します。
冷却方法:
- パッシブ:アルミニウムヒートシンク、エアフロー
- アクティブ:内蔵または追加ファン
- 液冷:高出力設備向け
| ESCタイプ | 冷却方式 | 典型的な温度上昇 | コメント |
| 低価格PWM ESC | パッシブフィン+気流 | +30 °C | 外部の送風が必要な場合あり |
| 中価格FOC ESC | フィン+小型ファン | +20 °C | 高負荷時の性能がより良い |
| 高性能FOC ESC | 大型フィン+ファン | +10 °C | サーマルスロットリングはほとんど発生しない |
考慮すべき追加機能
テレメトリサポート – 回転数、電流、電圧、温度をフライトコントローラーに報告できます。
BEC(バッテリーエリミネーター回路) – 無線機/受信機に電源を供給するための5V/6Vレギュレータを内蔵しています。
定格電流:例:2A、3A
プログラミング機能 – USBリンク、Bluetooth、または専用のカーソルポットインターフェース経由。
ブレーキサポート – 電動自転車やロボット工学に役立ちます。
起動モード – ソフトスタート、アクティブブレーキ、ブレーキゼロ、モータータイミング調整。
ファームウェアサポート:
- BLHeli:マルチロータードローンで一般的で、通常はPWMとFOCの両方のバリエーションをサポートしています。
- VESCファームウェア:電動スケート、ロボット工学、高度なFOCチューニングで広く使用されています。
ESC 選択チェックリストと比較
ESC 選択チェックリスト
- 電圧互換性:ESCの最大電圧 > バッテリーのピーク電圧
- 電流容量:連続 ≥ 定常電流、バースト ≥ 起動/失速およびピークスパイク
- 制御方法:コスト重視の場合はPWM、効率、ノイズ、滑らかさ重視の場合はFOC
- 冷却ソリューション:モーター負荷プロファイルに合わせた熱経路のヒューズ
- 必要な機能:テレメトリ、BEC、プログラミング、ブレーキ、起動時のハンドリング
- フォームファクタと重量:ドローンやモバイルプラットフォームにとって重要
- ファームウェアとコミュニティサポート:チューニング、アップデート、ドキュメントの提供
サンプル比較表
| ESCモデル | 電圧 | 連続電流 | バースト電流 | 制御方式 | 冷却方式 | テレメトリー | BEC | 備考 |
| ESC-A | 2–4 S | 20 A | 25 A | PWM | パッシブフィン | なし | 5 V/2 A | 低価格ドローン用ESC |
| ESC-B | 3–6 S | 30 A | 40 A | PWM/FOC | 小型ファン | あり | 5 V/3 A | 中価格帯、マルチコプター対応 |
| ESC-C | 4–6 S | 40 A | 60 A | FOC | ファン+フィン | あり | 6 V/3 A | レーシング向け、スムーズなFOC |
| ESC-D(Eバイク) | 10 S | 100 A | 150 A | FOC | 大型フィン+ファン | あり | なし | 高トルクEバイクシステム用 |
組み合わせ例: モーターとESC
例1:ミニレーシングドローン
- モーター:2205サイズ、KV 2300、4セルバッテリー使用時、フルスロットル時に約15A消費
- バッテリー:4セルLiPo(公称14.8V、ピーク時約16.8V)
- ESC:連続20A以上、バースト約25A、オーバーヘッド用定格5セル、スムーズコントロール → ESC-B(3~6セル、連続30A、バースト40A、PWM/FOC、小型ファン)
例2:電動自転車駆動モーター
- モーター:アウトランナーギア付きハブ、36Vバッテリー(10S)でピーク時60A、巡航時30Aの電流を消費します。
- バッテリー:公称36V(ピーク時約42V)
- ESC:連続30A以上、バースト60A以上の電流が必要です。スムーズな走行と回生走行にはFOCが推奨されます。ESC-D(10S、連続100A)が適合します。
例3:重い荷物を積んだRCボート
- モーター:大型アウトランナー、6セルで連続25A、ピーク50A
- バッテリー:6セルLiPo(公称22.2V、ピーク25.2V)
- ESC:連続30A以上、バースト60A以上が必要です。FOC(オフロード)を使用すると、水上バイクでより静かに動作します。ESC-C(4~6セル、連続40A、バースト60A、FOC)をお選びください。
ESCとモーターの仕様データのマッチングに関する注意事項
モーターのデータシート、またはタコメーターと電力計による測定値から、モーター電流のおおよその値を計算してください。
モーターとESCの発熱は安全範囲内である必要があります。初期試験中は部品の温度を監視してください。
負荷時の電圧低下を考慮してください。セル電圧は4.2Vから3.7V以下に低下する可能性があります。それに応じてESCのマージンを選択してください。
ESCをアップグレード(およびFOC(低電圧・高電流)の活用)すると、バッテリー寿命が延び、発熱が低減し、スロットルの応答性が向上します。
まとめと推奨事項
PWM ESCは費用対効果が高く、多くの用途に最適です。十分な電圧と電流定格を持つモデルを選択してください。
FOC ESCは、よりスムーズで効率的な動作のために追加コストをかける価値があります。特にロボット工学、電動自転車、ボート、ノイズの多い用途や精密機器用途では効果的です。
信頼性と熱マージンを確保するため、電圧と電流は常にオーバースペックに設定してください。
必要な機能(テレメトリー、BEC、ブレーキ)は、制御システムと利便性のニーズを反映する必要があります。
上記のペアリング例表をテンプレートとして、アウトランナーBLDCプロジェクト用のESCをお選びください。