ステッピングモーターは、精密モーションコントロールシステムの重要な部品です。その価値は、離散的な制御動作をステップごとに実行できることにあります。ステッピングモーターの動作性能は、位相構成と密接に関連しています。位相構成は、1回転あたりのステップ数、トルク発生量、動作の滑らかさを決定する基本概念です。
ステッピングモーターの位相とは?
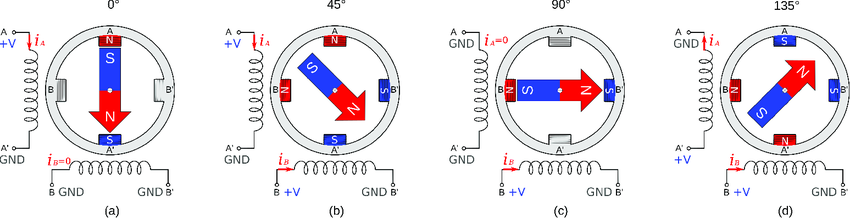
ステッピングモーターにおける位相とは、ステーター内の個々の巻線(コイル)を指します。ステーターはモーターの固定部分であり、電気エネルギーが機械的な動きに変換されます。各位相は順番に通電され、回転磁界を発生させます。この磁界は、歯付き永久磁石または鉄心であるローターを引っ張ります。磁界がステップごとに移動すると、ローターもステップごとに移動し、モーター特有のステッピング動作を生み出します。
ステッピングモーターの位相数は、モーターの動作に直接影響します。たとえば、一般的な構成には 2 相、3 相、5 相ステッピング モーターが含まれ、それぞれ独自のパフォーマンス特性があります。
2相ステッピングモーター
2相ステッピングモーターは、特に低~中性能のアプリケーションにおいて最も一般的なタイプです。巻線構成には、ユニポーラとバイポーラの2種類があります。
ユニポーラステッピングモーター
ユニポーラステッピングモーターでは、各相巻線がセンタータップによって2つの半分に分割されています。電流が一度に巻線の半分のみに流れる設計のため、一度に1つのコイルを効率的に充電できます。ユニポーラモーターの利点は、電流の方向を反転する必要がないため、制御回路が簡素化されることです。
ユニポーラモーターの特性:
- シンプルな制御:ユニポーラステッピングモーターは電流の方向を変える必要がないため、制御が容易です。
- 低トルク:巻線の半分のみが一度に通電されるため、ユニポーラモーターはバイポーラモーターに比べてトルクが低くなる傾向があります。
- 一般的な用途:プリンターやCNCマシンなど、シンプルさとコスト効率が重視される低電力アプリケーションでよく使用されます。
バイポーラステッピングモーター
一方、バイポーラステッピングモーターは、各相の巻線全体を使用しますが、電流の方向を反転させる必要があります。つまり、バイポーラモーターでは、電流の方向を制御するために、Hブリッジ回路を用いたより複雑な制御システムが必要になります。しかし、巻線の両側を使用するため、バイポーラステッピングモーターはユニポーラモーターよりも高いトルクを発生します。
バイポーラモーターの特徴:
- 高トルク:全巻線を使用しているため、同サイズのユニポーラモーターよりも高いトルクを発生します。
- より複雑な制御:電流の方向を反転するにはHブリッジ回路が必要です。
- 一般的な用途:バイポーラステッピングモーターは、産業オートメーション、ロボット工学、ハイエンド3Dプリンターなどの高性能アプリケーションで使用されます。
三相ステッピングモーター
三相ステッピングモーターは二相モーターほど一般的ではありませんが、特に動作の滑らかさとトルク発生の点でいくつかの利点があります。相数が増えることで磁場の回転がより連続的になり、より滑らかな動作と振動の低減につながります。
三相ステッピングモーターの特徴:
- スムーズな動作:相数が多いほど、ステップ間の遷移がスムーズになり、振動が低減します。
- 高効率:三相ステッピングモーターは二相モーターに比べて効率が高く、同じ電力入力に対してより大きなトルクを発生できます。
- 複雑な制御要件:相数が多いほどモーターの性能は向上しますが、制御回路が複雑になり、より高度なドライバが必要になります。
- 一般的な用途:これらのモーターは、スムーズな動作と高トルクが不可欠な医療機器などの高精度アプリケーションでよく使用されます。
5相ステッピングモーター
5相ステッピングモーターは、より微細な制御が可能で、ステッピングモーターの中で最も滑らかで効率的な構成として知られています。相数が多いほど、ローターの動きが細かくなり、分解能が向上し、振動がさらに低減されます。
5相ステッピングモーターの特徴:
- 非常にスムーズな動作:多数の位相を持つため、極めて小さなステップ角を実現し、非常にスムーズな動作を実現します。
- 高分解能:5相モーターは高分解能ステップを実現できるため、精密な位置決めが求められる用途に最適です。
- 高価で複雑:位相数が多いため、これらのモーターは高価で、複雑な制御システムを必要とします。
- 一般的な用途:最高レベルの精度が求められる場合、半導体製造装置などの特殊機械に使用されます。
相構成が性能に与える影響
ステッピングモーターの相数は、以下のようないくつかの重要な性能特性に影響を与えます。
ステップ角度
ローターが1ステップで移動する角度距離をステップ角といいます。相数の多いモーターは一般的にステップ角が小さく、モーターの位置をより細かく制御できます。例えば、2相ステッピングモーターのステップ角は1.8度で、1回転には200ステップかかります。一方、5相ステッピングモーターではステップ角は0.72度と小さく、1回転あたり500ステップとなります。
トルク
トルク発生は、位相構成によって影響を受けるもう一つの重要な要素です。各巻線の両半分を使用するバイポーラモータは、同じサイズのユニポーラモータよりも大きなトルクを発生します。同様に、三相モータと五相モータは、磁界の連続性が高いため、より高いトルクを発生します。
動作の滑らかさ
相数が多いほど、ステップ間の遷移がスムーズになり、振動が低減し、精度が求められる用途における性能が向上します。一般的に、5相モーターが最もスムーズで、次いで3相モーター、そして2相モーターの順となります。
制御の複雑さ
制御システムの複雑さは、ステージ数の増加に伴って増大します。例えば、2相ユニポーラモーターは制御が最もシンプルですが、5相モーターでは巻線への通電を制御するために、より複雑な回路が必要になります。
結論
相構成とそれがモーターの動作に与える影響について詳しく知りたい場合は、精密制御システムの最適なパフォーマンスを確保するために、専門のステッピングモーターメーカーにご相談ください。