様々な機械・電子用途で使用されるモーターについて議論する際に、ステッピングモーターとDCモーターの両方が頻繁に言及されます。ステッピングモーターは技術的にはDCモーターの一種ですが、設計、動作、用途は従来のDCモーターとは大きく異なります。これらの違いを理解することは、プロジェクトに最適なモーターを選択しようとしているエンジニア、愛好家、技術者にとって不可欠です。
ステッピングモーター:DCモーターのサブタイプ
違いを検討する前に、ステッピングモーターがDCモーターのサブセットであることを理解することが重要です。ステッピングモーターと従来のDCモーターはどちらも直流(DC)で動作し、つまり一方向に流れる電気によって駆動されます。しかし、構造と動作方法が異なり、特性と用途も異なります。
ステッピングモーターと呼ばれる特定の種類のDCモーターは、明確なステップで回転するように作られています。連続回転する従来のDCモーターとは異なり、ステッピングモーターは電気パルスが印加されると、正確な角度(ステップ)で段階的に進みます。ステッピングモーターは、正確な位置制御を可能にするステップ動作のため、精密な動きを必要とするアプリケーションに最適です。
ステッピングモーターとDCモーターの仕組み
ステッピングモーターとDCモーターの違いを理解するには、それぞれのモーターの動作原理を理解することが重要です。
ステッピングモーターの動作
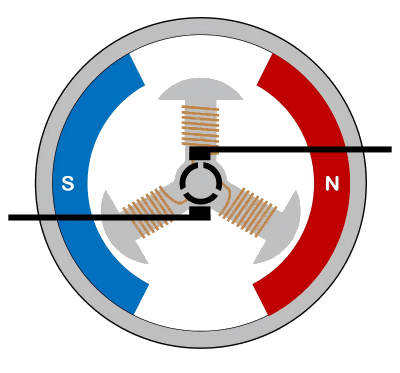
ステッピングモーターは、ローター(磁性コアまたは強磁性コア)と、その周囲を位相が揃った複数のステーターコイルで構成されています。これらのコイルは磁場を発生させ、ローターを引き付けたり反発したりすることで、通電順序に応じてローターを段階的に移動させます。各ステップは1回転の一部を表し、通常1.8°から15°の範囲です。コイルへの順次通電は、ステッピングモータードライバまたはマイクロコントローラによって制御され、モーターを所定のステップで正確に移動させることができます。
ステッピングモーターの主な特性は次のとおりです。
- 離散動作:ステッピングモーターはステップ状に移動するため、位置と回転を正確に制御できます。
- 高い保持トルク:ステッピングモーターは回転していないときに、高いトルクで位置を維持できます。
- パルス制御:ステッピングモーターは、ステップ数と移動方向を指定する電流パルスを取得することで動作します。
DCモーターの動作
一方、従来のDCモーターはより単純な原理で動作します。DCモーターは通常、ローター(アーマチュア)と一定の磁場を生成するステーターで構成されます。端子に電圧が印加されると、アーマチュア巻線に電流が流れ、ステーターの磁場と相互作用する磁場が生成されます。この相互作用によってトルクが生成され、ローターが連続的に回転します。
DC モーターの主な特性は次のとおりです。
- 連続回転:DCモーターは通電すると連続的に回転するため、滑らかで連続的な動きが求められる用途に適しています。
- シンプルな操作:制御が簡単で、多くの場合、可変電源または速度制御用のモーターコントローラーのみが必要です。
- 高速:DCモーターは高速回転が可能であるため、ファン、ポンプ、その他の機械システムなどの用途に適しています。
ステッピングモーターとDCモーター
どちらも直流で駆動しますが、ステッピングモーターとDCモーターは構造、制御機構、用途が大きく異なります。以下は、これら2種類のモーターの主な違いです。
A. 動作と位置決め
ステッピングモーター:正確な増分移動能力がステッピングモーターの特徴です。そのため、ステッピングモーターは、ロボットアーム、CNCマシン、3Dプリンターなど、精密な位置決めが必要なデバイスに最適です。モーターに与えられるパルス数によって移動量が決まるため、ステッピングモーターは位置を維持するためのフィードバックシステムを必要としません。
DCモーター:従来のDCモーターは連続回転が可能で、コンベアベルトやシンプルな機械駆動装置など、滑らかで途切れのない動作が求められる用途に適しています。DCモーターの位置制御では、位置の追跡と修正のために、ポテンショメーターやエンコーダなどの外部フィードバック機構が必要になることがよくあります。
B. 速度制御
ステッピングモーター:入力パルス周波数を変化させることで、ステッピングモーターは正確な速度制御が可能です。ただし、最高速度はDCモーターよりも一般的に低く、速度が上昇するにつれてトルクも減少します。ステッピングモーターは、精密な動作と速度制御の両方が求められる用途に適しています。
DCモーター:DCモーターは高速動作に優れており、速度制御も比較的容易です。速度調整には、パルス幅変調(PWM)または入力電圧の変更が使用できます。DCモーターは、ステッピングモーターに比べて高速回転時におけるトルクの維持性に優れています。
C. トルクと出力
ステッピングモーター:ステッピングモーターの利点の一つは、低速でも高いトルクを維持できることです。そのため、連続回転がなくても位置をしっかりと保持するのに最適です。この高い保持トルクは、負荷がかかった状態で静止位置を維持する必要がある用途で特に有効です。
DCモーター:DCモーターは高速回転時に高いトルクを発生できますが、一般的にモーターの速度が低下するとトルクは低下します。ギアシステムを追加することでトルクを増加させることは可能ですが、静止時に追加の制御なしにトルクを維持する能力は備えていません。
D. 複雑さと制御
ステッピングモーター:ステッピングモーターの制御システムはDCモーターよりも複雑です。ステッピングモーターは、モーターを特定のステップで回転させるためにパルスシーケンスを送信する専用のコントローラーまたはドライバーを必要とします。しかし、この複雑さにより、動きと位置をより正確に制御することが可能になります。
DCモーター:DCモーターは、電源と、オプションで速度調整用のモータードライバーまたはコントローラーのみを必要とするため、制御が簡単です。方向制御はシンプルなHブリッジ回路で実現できるため、基本的なアプリケーションへの実装が容易です。
E. フィードバックと精度
ステッピングモーター:ステッピングモーターには、オープンループ制御にフィードバックデバイスを必要としないという利点があります。正確な位置はパルス数によって決定されるため、高い精度が保証されます。しかし、閉ループシステムがなければ、高負荷時や高速運転時にステップミスが発生するリスクがあります。
DCモーター:DCモーターでは、正確な位置決めを実現するために、通常、モーターの位置や速度に関する情報を提供するエンコーダなどのフィードバックシステムが必要です。この閉ループ制御により、より高い精度が確保され、動作中の偏差が補正されます。
以下に比較表を示します。
| 特徴 | ステッピングモーター | DCモーター |
| 動作 | 正確なステップで動作 | 連続回転 |
| 制御 | パルス制御用の複雑なドライバが必要 | 電源による簡単な制御 |
| 位置決め | フィードバックなしで高精度 | 正確な位置決めにはフィードバックが必要 |
| トルク | 低速で高トルク | 高速で高トルク |
| 速度 | 最大速度は低い | 最大速度は高い |
| ホールディングトルク | 停止時に位置を保持可能 | 位置保持には電力が必要 |
| 用途 | 精密作業(例: 3Dプリンター、CNC) | 高速作業(例: ファン、ポンプ) |
アプリケーションへの適合性
ステッピングモーターとDCモーターのどちらを使用するかは、アプリケーションの具体的な要件によって異なります。
ステッピングモーターは、位置と動きを正確に制御する必要がある状況に最適です。一般的な例としては、以下のようなものがあります。
- 3Dプリンティング:プリンターヘッドの正確な動きを実現します。
- CNCマシン:ツールの正確な位置決めを実現します。
- ロボットアーム:ピックアンドプレース操作における制御された動きを実現します。
DCモーターは、精度をあまり重視せず、連続的で滑らかな回転を必要とする用途に最適です。一般的に以下の用途に使用されます。
- ファンとブロワー:一定の空気の流れを確保します。
- 電気自動車:スムーズで効率的な推進力を提供します。
- コンベアベルト:材料搬送における安定した動きを確保します。
ステッピングモーターはDCモーターの一種ですが、その独自の特性により従来のDCモーターとは一線を画しています。明確な増分で動作するため、ステッピングモーターメーカーは、正確な制御と位置決めが求められる用途において、非常に優れた性能を発揮するようにこれらのモーターを開発しています。一方、従来のDCモーターは操作が簡単で、高速連続回転タスクに適しています。