يحقق محرك التروس التوافقي انعدام التراخي من خلال التشوه المرن، والتشابك متعدد الأسنان، والتحميل المسبق الدائم. يعمل مولد الموجات على إعادة تشكيل الشريحة المرنة، مما يحافظ على تشابك أسنانها بإحكام مع الشريحة الدائرية. ونظرًا لأن الأسنان تظل متشابكة تمامًا أثناء الدوران وعكس الحمل، فإن علبة التروس قادرة على القضاء على الفراغ الذي يتسبب في حدوث التراخي.
ما هو التباطؤ في محرك التروس؟
الارتداد هو الفجوة الصغيرة بين أسنان التروس المتشابكة. في أنظمة التروس التقليدية، عادةً ما تكون هناك حاجة إلى قدر معين من الفجوة للتزييت، والتمدد الحراري، والتفاوت في التصنيع، والدوران السلس.
ومع ذلك، يمكن أن تتسبب هذه الفجوة في حدوث خطأ في الحركة. عندما يعكس المحرك اتجاهه، قد يدور عمود الإدخال قليلاً قبل أن يستجيب عمود الإخراج. يُسمى هذا التأخير بالارتداد.
في التطبيقات الدقيقة، يمكن أن يؤدي الارتداد إلى:
- خطأ في تحديد الموضع
- الاهتزاز
- الضوضاء
- ضعف التكرار
- انخفاض دقة التحكم في الحركة
- حركة مفصل الروبوت غير مستقرة
على سبيل المثال، إذا استخدم ذراع الروبوت علبة تروس بها تباطؤ، فقد لا يتوقف الذراع بالضبط في المكان الذي يأمره جهاز التحكم بالتوقف فيه. وهذا يمكن أن يؤثر على دقة التجميع، واستقرار الإمساك، والأداء العام للروبوت.

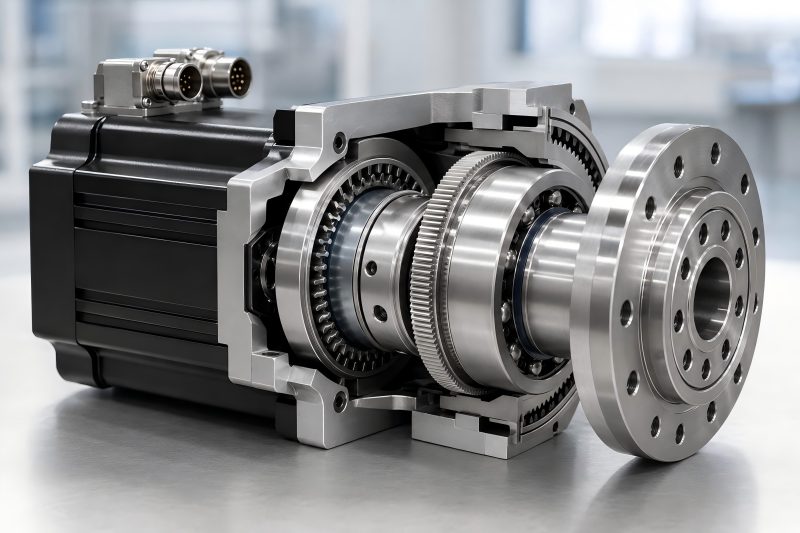
الهيكل الأساسي لمحرك التروس التوافقي
يجمع محرك التروس التوافقي بين محرك كهربائي ومخفض توافقي. يتكون المخفض التوافقي بشكل أساسي من مولد موجات ومرن ومرن دائري. تصف شركة Harmonic Drive التروس الموجية بأنها نظام يعتمد على الميكانيكا المرنة للمعادن، باستخدام هذه الأجزاء الأساسية الثلاثة لتحقيق خصائص عدم وجود تباطؤ وهيكل مدمج.
| المكونات | الهيكل | الوظيفة في عدم وجود تباطؤ |
| مولد الموجات | كاميرا بيضاوية مع محمل | يحول الفليكسسبلاين إلى شكل بيضاوي |
| الشريط المرن | كوب رقيق مرن بأسنان خارجية | يتشابك بإحكام مع الشريحة الدائرية |
| الشريحة الدائرية | حلقة صلبة ذات أسنان داخلية | يوفر تثبيتًا ثابتًا للترس |
| المحرك | محرك سيرفو أو متدرج أو BLDC | يوفر دوران الإدخال |
| شفة/عمود الإخراج | متصل بـ flexspline أو هيكل الإخراج | يوفر سرعة منخفضة وعزم دوران عالي |
يتمثل الاختلاف الرئيسي عن علب التروس العادية في أن أحد مكونات التروس مرن. تسمح هذه المرونة لأسنان التروس بالحفاظ على التلامس دون الاعتماد على فراغ فضفاض.
كيف تعمل آلية التروس التوافقية
يقوم المحرك بتشغيل مولد الموجات. يقع مولد الموجات الإهليلجي داخل الفليكسسبلاين. وعندما يدور، فإنه يجبر الفليكسسبلاين على التشوه ليصبح شكله إهليلجيًا.
يحتوي الفليكسسبلاين على أسنان خارجية، بينما يحتوي السبلين الدائري على أسنان داخلية. يتشابك الفليكسسبلاين مع السبلين الدائري عند نقطتين متقابلتين من الشكل الإهليلجي. تشرح شركة هارمونيك درايف (Harmonic Drive) أن الفليكسسبلاين أصغر قليلاً ويحتوي على أسنان أقل من السبلين الدائري، وغالباً ما يكون الفرق بينهما سنين. مع دوران مولد الموجات، تحرك كل دورة كاملة الفليكسسبلاين بمقدار هذا الفرق في عدد الأسنان.
وهذا يتيح تخفيضاً كبيراً في السرعة في مساحة محدودة. والأهم من ذلك، أن الأسنان لا تتشابك بشكل فضفاض. بل يتم ضغطها للتشابك عن طريق التشوه المرن.
كيف يتم تحقيق عدم وجود تباطؤ
التشوه المرن يزيل الفراغ بين الأسنان
في علبة التروس التقليدية، يوجد تباطؤ لأن الأسنان تحتاج إلى فراغ. في محرك التروس التوافقي، يتشوه الفليكسسبلاين بشكل مرن بواسطة مولد الموجات. يدفع هذا التشوه أسنان الفليكسسبلاين إلى أسنان السبلين الدائري.
نظرًا لأن الفليكسسبلاين مرن، فإنه يمكنه الحفاظ على تلامس وثيق بين الأسنان أثناء الدوران. هذا يقلل أو يزيل الفراغ الذي يسبب عادةً التباطؤ.
بعبارات بسيطة، لا يعتمد صندوق التروس على تباعد الأسنان. فهو يستخدم ضغطًا مرنًا متحكمًا فيه للحفاظ على تداخل أسنان التروس.
تشابك أسنان متعددة في نفس الوقت
غالبًا ما تنقل التروس المستقيمة التقليدية أو التروس الكوكبية الحمل عبر عدد محدود من أسنان التروس. يتشابك مخفض التروس التوافقي مع العديد من الأسنان عبر مناطق تلامس أوسع.
تشير شركة هارمونيك درايف إلى أن فليكسسبلاين والسبلاين الدائري يتشابكان عبر منطقتين على طول المحور الرئيسي للقطع الناقص لمولد الموجة، وليس فقط عند نقطة واحدة. يتيح التداخل المستمر للأسنان على طول المحور الرئيسي عدم وجود تباطؤ في رؤوس التروس ذات الموجة الإجهادية.
يعمل هذا التداخل متعدد الأسنان على تحسين توزيع الحمل، وتقليل الفراغ المحلي بين الأسنان، وزيادة الصلابة الالتوائية.
يحافظ التحميل المسبق الدائم على تلامس الأسنان
هناك سبب مهم آخر وهو التحميل المسبق. في نظام التروس التوافقية، يتم ضغط الفليكسسبلاين باستمرار ضد السبلين الدائري بواسطة مولد الموجة.
يحافظ هذا التحميل المسبق على تلامس الأسنان بشكل محكم أثناء عكس الحمل. تذكر شركة Harmonic Drive SE أنه بفضل التحميل المسبق الدائم، لا يوجد تباطؤ في أسنان تروس Harmonic Drive، بما في ذلك عند عكس الحمل.
لهذا السبب تعتبر محركات التروس التوافقية مناسبة للتطبيقات التي تتطلب حركة متكررة للأمام وللخلف، مثل مفاصل الروبوتات ومراحل تحديد المواقع بدقة.
يعوض Flexspline الأخطاء الصغيرة
نظرًا لأن الفليكسسبلاين مرن، فإنه يمكنه امتصاص الاختلافات الصغيرة في التصنيع والتجميع بشكل أفضل من زوج التروس الصلب تمامًا. وهذا يساعد في الحفاظ على التداخل السلس ويقلل من الارتخاء.
ومع ذلك، هذا لا يعني أن الفليكسسبلاين ضعيف. فقد تم تصميم الفليكسسبلاين ليكون مرنًا شعاعيًا ولكنه صلب من حيث الالتواء. وهذا يعني أنه يمكن أن يتشوه في الشكل مع استمرار نقل عزم الدوران بدقة.
عدم وجود تباطؤ مقابل صلابة عالية في الالتواء
لا يعني عدم وجود تباطؤ أن علبة التروس لا تتعرض لأي تشوه مرن على الإطلاق. وهذا تمييز مهم.
يشير التباطؤ إلى الفراغ الميكانيكي الحر بين أسنان التروس. بينما تشير الصلابة الالتوائية إلى مقدار التواء المخرج تحت الحمل.
يمكن أن يكون لمحرك التروس التوافقي تباطؤ صفري، ولكنه لا يزال يظهر انحرافًا مرنًا صغيرًا تحت تأثير عزم الدوران. وهذا أمر طبيعي لأي ناقل حركة ميكانيكي. بالنسبة للأنظمة عالية الدقة، يجب على المهندسين مراعاة كل من التباطؤ والصلابة الالتوائية.
| العنصر | المعنى | التأثير على الحركة |
| الارتداد | الخلوص الحر بين أسنان التروس | يؤدي إلى فقدان الحركة أثناء تغيير الاتجاه |
| الصلابة الالتوائية | مقاومة الالتواء تحت الحمل | يؤثر على تحديد الموضع تحت تأثير عزم الدوران |
| خطأ في النقل | الفرق بين الموضع المثالي والموضع الفعلي | يؤثر على الدقة والسلاسة |
| التكرار | القدرة على العودة إلى نفس الموضع | يؤثر على استقرار الحركة الدقيقة |
بالنسبة لمفاصل الروبوت، يساعد انعدام التباطؤ في القضاء على الارتخاء، بينما تساعد الصلابة الالتوائية العالية المفصل على مقاومة الالتواء تحت الحمل الخارجي.
لماذا يعد انعدام التباطؤ أمرًا مهمًا في التحكم في الحركة
دقة تحديد الموضع الأفضل
في أنظمة المؤازرة، يرسل جهاز التحكم أوامر تحديد موقع دقيقة. إذا كان صندوق التروس يعاني من تباطؤ، فقد يظهر مشفر المحرك حركة، ولكن قد لا يتحرك جانب الإخراج على الفور. وهذا يؤدي إلى حدوث خطأ في تحديد الموقع.
يقلل محرك التروس التوافقي من هذه المشكلة لأن الإخراج يستجيب بشكل أكثر مباشرة لحركة المحرك.
قابلية تكرار أعلى
تضمن قابلية التكرار عودة النظام إلى نفس الموضع. يساعد انعدام التباطؤ على تحسين قابلية التكرار لأن هناك تراخي عشوائي أقل أثناء تغييرات الاتجاه.
هذا مهم بالنسبة لـ:
- أذرع الروبوت
- معالجة رقائق أشباه الموصلات
- المحاور الدوارة CNC
- معدات التصوير الطبي
- أنظمة الضبط البصري
- آلات الفحص
عكس اتجاه أكثر سلاسة
تتطلب العديد من الآلات الدقيقة تغييرات متكررة في الاتجاه. في حالة وجود تباطؤ، قد يتسبب كل انعكاس في حدوث صدمات أو اهتزازات أو حركة غير مستقرة.
يوفر محرك التروس التوافقي انعكاسًا أكثر سلاسة لأن الأسنان تظل متشابكة تحت الحمل المسبق.
تحسين استقرار مفاصل الروبوت
بالنسبة للروبوتات، يمكن أن يؤدي التباطؤ إلى شعور بارتخاء المفاصل. في الروبوتات البشرية الشكل أو الروبوتات التعاونية أو الروبوتات الجراحية، يمكن أن يؤدي ارتخاء المفاصل إلى تقليل السلامة وجودة الحركة.
تساعد محركات التروس التوافقية مفاصل الروبوت على التحرك بدقة أكبر، والحفاظ على الوضع بشكل أفضل، والاستجابة بشكل أكثر طبيعية.
محرك التروس التوافقي مقابل محركات التروس التقليدية
| الميزة | محرك التروس التوافقي | محرك التروس الكوكبي | محرك التروس المستقيمة | محرك التروس الدودية |
| الارتداد | صفر أو قريب من الصفر | منخفض إلى متوسط | متوسط | متوسط |
| تشابك الأسنان | تداخل أسنان متعددة بشكل مرن | تلامس تروس متعددة | تلامس محدود للأسنان | تلامس انزلاقي |
| نسبة التخفيض | عالية في مرحلة واحدة | متوسط إلى مرتفع | عادة ما يكون منخفضًا | متوسط إلى مرتفع |
| الحجم | مضغوط للغاية | مضغوط | بسيط ولكن أكبر بالنسبة للنسبة العالية | غالبًا ما يكون أكثر ضخامة |
| الدقة | ممتاز | جيد | متوسط | متوسط |
| أفضل استخدام | الروبوتات، الأتمتة الدقيقة، الفضاء | الأتمتة العامة | نقل بسيط | نقل عزم الدوران بسرعة منخفضة |
يمكن لمحرك التروس الكوكبي أيضًا أن يوفر عزم دوران جيدًا وحجمًا صغيرًا، ولكنه يحتاج عادةً إلى تصنيع دقيق للغاية ومراحل متعددة لتقليل التباطؤ. يحقق محرك التروس التوافقي تباطؤًا منخفضًا أو صفريًا بشكل أساسي من خلال هيكل موجة الإجهاد المرن.
المزايا الرئيسية لمحركات التروس التوافقية ذات التباطؤ الصفري
دقة عالية
يسمح التراخي الصفري لمخرج المحرك بمتابعة أمر الإدخال بدقة أكبر. وهذا مفيد للآلات التي تتطلب تحديدًا زاويًا دقيقًا للموضع.
تصميم مدمج
يمكن لمحركات التروس التوافقية تحقيق نسب تخفيض عالية في مرحلة واحدة. تذكر شركة Harmonic Drive SE أن التروس ذات الموجات المرنة يمكنها تحقيق نسب تخفيض تتراوح من 30:1 إلى 160:1 باستخدام ثلاثة مكونات فقط، في حين أن الحلول المخصصة للعملاء يمكن أن تصل إلى نسب أعلى.
كثافة عزم دوران عالية
نظرًا لأن العديد من الأسنان تتشارك الحمل، يمكن لمحركات التروس التوافقية نقل عزم دوران عالي في هيكل مدمج. ولهذا السبب فهي مناسبة لمفاصل الروبوتات ووحدات الأتمتة المدمجة.
حركة سلسة
يساعد التداخل المستمر للأسنان على تقليل الاهتزاز وتحسين سلاسة الحركة. وهذا أمر مهم للتطبيقات التي تتطلب تشغيلًا هادئًا وحركة مستقرة.
مجالات التطبيق
تُستخدم محركات التروس التوافقية على نطاق واسع في الصناعات الدقيقة التي يكون فيها التحكم في الارتداد أمرًا بالغ الأهمية.
| التطبيق | أهمية عدم وجود تباطؤ |
| الروبوتات البشرية | تحسين استقرار المفاصل وتوازن المشي ودقة الحركة |
| أذرع الروبوتات الصناعية | يدعم تحديد المواقع بدقة والحركة القابلة للتكرار |
| معدات أشباه الموصلات | تتيح معالجة الرقائق وحركات الفحص بدقة |
| الأجهزة الطبية | توفر حركة سلسة ومحكومة ودقيقة |
| أنظمة الفضاء | تدعم آليات دقيقة وموثوقة وصغيرة الحجم |
| الأجهزة البصرية | تساعد في تحقيق ضبط زاوي دقيق |
| طاولات دوارة CNC | تحسن دقة الفهرسة وجودة التصنيع |
المفاهيم الخاطئة الشائعة حول عدم وجود تباطؤ
عدم وجود تباطؤ لا يعني عدم وجود أخطاء
يمكن لمحرك التروس التوافقي أن يزيل الفجوة بين الأسنان، ولكن قد تظل هناك أخطاء أخرى. وقد تشمل هذه الأخطاء خطأ التشفير، وخطأ ضبط التحكم، وتشوه المحمل، واختلال محاذاة العمود، والانحراف المرن المرتبط بالحمل.
عدم وجود تباطؤ لا يعني قدرة تحميل غير محدودة
إذا تعرض محرك التروس لحمل زائد، فقد تتأثر الدقة وعمر الخدمة. من المهم اختيار عزم الدوران الصحيح.
تتطلب “صفر تباطؤ” تركيبًا صحيحًا
حتى محرك التروس التوافقي عالي الجودة قد يعمل بشكل سيئ إذا كان سطح التثبيت غير مستوٍ أو كان المحور غير محاذي أو لم يتم دعم الحمل بشكل صحيح.
كيفية اختيار محرك تروس هارموني بدون تباطؤ
عند اختيار محرك التروس التوافقي، يجب ألا يقتصر المشترون على السؤال عما إذا كان خاليًا من التباطؤ أم لا. بل يجب عليهم أيضًا تقييم نظام الحركة بالكامل.
تشمل عوامل الاختيار المهمة ما يلي:
- عزم الدوران المقنن
- عزم الدوران الأقصى
- نسبة التخفيض
- صلابة الالتواء
- دقة تحديد الموضع
- التكرار
- قدرة تحمل المحمل الناتج
- نوع المحرك
- دقة التشفير
- دورة التشغيل
- مساحة التركيب
- متطلبات العمر التشغيلي
بالنسبة للتطبيقات المتطورة، من المهم أيضًا التحقق من عزم القصور الذاتي للحمل، والتسارع، وحمل الصدمات، والأداء الحراري، وظروف التشحيم.
