تشتهر محركات السائر بدقتها وإمكانية تكرارها، مما يجعلها الخيار الأمثل في الأتمتة والطباعة ثلاثية الأبعاد وآلات التحكم الرقمي بالحاسوب (CNC) والروبوتات. ولكن بدون مُشغِّل مُناسب، قد لا يُؤدي حتى أفضل مُشغِّل مُناسب أداءً جيدًا. بصفتنا مُورِّدًا لمحركات السائر، فقد واجهنا حالات لا تُحصى حيث عُزيت أعطال النظام إلى مُشغِّلات غير متوافقة أو ضعيفة القدرة.
ما هو محرك السائر؟
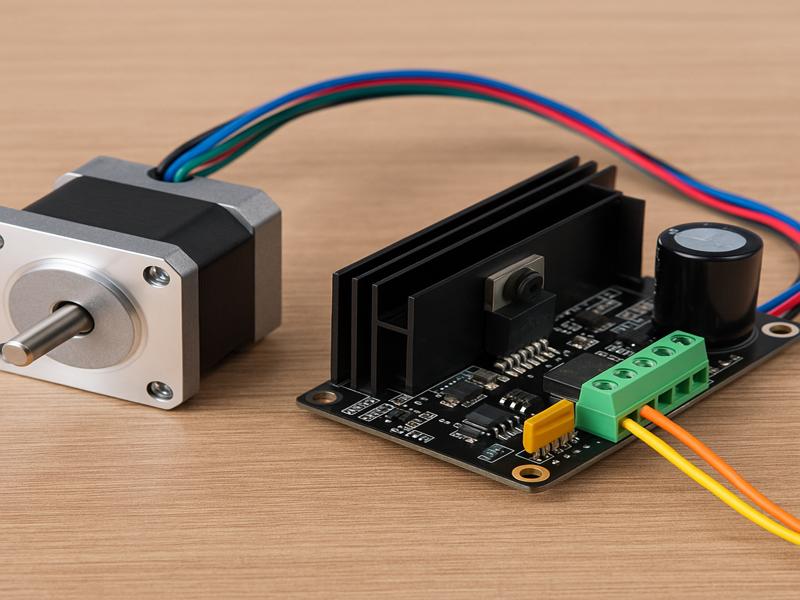
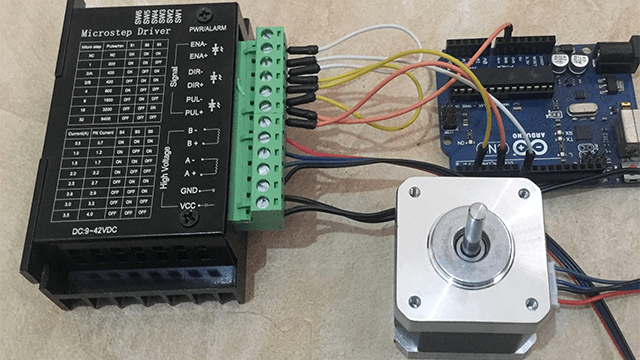
يُزوّد مُشغّل المحرك الخطوي الملفات بالتيار الكهربائي بناءً على إشارات التحكم. يُترجم نبضات الخطوة والاتجاه من وحدة تحكم أو متحكم دقيق (مثل Arduino أو STM32 أو PLC)، ويُنشّط الملفات بالتسلسل الصحيح لتحقيق الدوران.
الوظائف الرئيسية لمحرك السائر:
- تفسير إشارات التحكم (الخطوة والاتجاه)
- التحكم في التيار المورد إلى الملفات
- تمكين الخطوات الدقيقة لحركة أكثر سلاسة
- إدارة تسارع المحرك وتباطؤه
- الحماية من التيار الزائد والسخونة الزائدة وانخفاض الجهد
المعايير الرئيسية التي يجب مراعاتها عند اختيار السائق
عند اختيار مُشغِّل محرك متدرج، يجب عليك أولًا مطابقته للخصائص الكهربائية والميكانيكية لمحركك. إليك العوامل الأساسية:
نوع المحرك (أحادي القطب مقابل ثنائي القطب)
| نوع المحرك | الوصف | متطلبات السائق |
| أحادي القطب | يحتوي على ملفات ذات نقطة وسطية. أسهل في التشغيل ولكن عزم الدوران أقل. | متوافق مع السائق أحادي القطب (5 أو 6 أسلاك) |
| ثنائي القطب | لا يحتوي على نقطة وسطية، يتطلب جسر H. يوفر عزم دوران أكبر. | يحتاج إلى سائق ثنائي القطب (4 أسلاك) |
تعتبر المحركات ثنائية القطب أكثر شيوعًا بسبب نسبة عزم الدوران إلى الحجم الأفضل.
تصنيفات الجهد والتيار
قم بمطابقة تصنيفات الجهد والتيار للمحرك والسائق:
- التيار (أمبير/طور): يجب على مُشغِّل المحرك أن يتحمل التيار المُصنَّف للمحرك لكل طور. اختر دائمًا مُشغِّلًا ذا قدرة تيار أعلى بنسبة ١٠-٢٠٪ لتوفير مساحة إضافية.
- الجهد (فولت): يوفر الجهد العالي أداءً أفضل في السرعة العالية ولكن يجب أن يظل ضمن حدود السائق.
-
مثال على المحرك خطوة التيار المقنن التيار الموصى به للسائق NEMA 17 (42HS40) 1.5 A 1.7 – 2.0 A NEMA 23 (57BYGH76) 2.8 A 3.0 – 3.5 A
دعم الخطوات الدقيقة
تُحسّن تقنية الخطوات الدقيقة سلاسة الحركة ودقتها. مستويات الخطوات الدقيقة الشائعة:
| وضع الميكروستيبينغ | عدد الخطوات لكل دورة (محرك 1.8°) |
| خطوة كاملة | 200 خطوة |
| نصف خطوة | 400 خطوة |
| 1/4 خطوة | 800 خطوة |
| 1/16 خطوة | 3200 خطوة |
| 1/32 خطوة | 6400 خطوة |
مزيد من الخطوات الدقيقة = حركة أكثر سلاسة ولكنها تتطلب إشارات أكثر دقة وقد تقلل عزم الدوران قليلاً.
واجهة التحكم
اختر برنامج التشغيل الذي يتوافق مع نظام التحكم الخاص بك:
| نوع التحكم | الواجهة | الاستخدام النموذجي |
| Step/Dir | إدخال TTL | أردوينو، PLCs، CNC |
| UART/I2C | ناقل تسلسلي | تحكم ميكروكنترولر متقدم |
| USB/CAN | تحكم مضيف | الروبوتات، التحكم الصناعي |
بالنسبة لمعظم التطبيقات، يعد التحكم في الخطوة/الاتجاه هو الأكثر وضوحًا ويحظى بدعم واسع النطاق.
معايير اختيار السائق الرئيسي
توافق التصنيف الحالي
يجب أن يتطابق تيار السائق بشكل وثيق مع تيار طور المحرك. تتيح العديد من السائقات الحديثة ضبط التيار عبر مفاتيح DIP أو برامج خاصة. يؤدي نقص التيار إلى انخفاض عزم الدوران، بينما قد يؤدي زيادة التيار إلى ارتفاع درجة حرارة المحرك.
- أفضل الممارسات: اختر برنامج تشغيل يدعم ما لا يقل عن 10% من التيار المقدر للمحرك، ولكن لا يتجاوز أبدًا الحد الأقصى لتيار المحرك.
تصنيف الجهد
يزيد الجهد العالي من سرعة المحرك وعزم الدوران الديناميكي، ولكنه يزيد أيضًا من تبديد الطاقة. تأكد دائمًا من أن برنامج التشغيل يدعم نطاق الجهد المطلوب للمحرك.
- نصيحة: إذا تم تصنيف محرك السائر الخاص بك عند 3 فولت و2 أمبير، فيمكن للسائق الذي يعمل عند 24 فولت تحسين الأداء بشكل كبير من خلال تنشيط الملف بشكل أسرع.
القدرة على الخطوات الدقيقة
تُقسّم تقنية Microstepping الخطوات لضمان حركة أكثر سلاسة ودقة في تحديد المواقع. اختر محركًا بناءً على الدقة المطلوبة لتطبيقك.
| وضع الميكروستيبينغ | عدد الخطوات لكل دورة (للمحرك 1.8°) |
| خطوة كاملة | 200 |
| نصف خطوة | 400 |
| 1/4 خطوة | 800 |
| 1/8 خطوة | 1600 |
| 1/16 خطوة | 3200 |
- نصيحة للتطبيق: استخدم خطوات دقيقة أعلى للتطبيقات الدقيقة مثل الطابعات ثلاثية الأبعاد أو تحديد موضع الكاميرا.
توافق واجهة التحكم
تأكد من أن السائق يقبل تنسيق إشارة التحكم التي يوفرها جهاز التحكم في الحركة الخاص بك:
- الخطوة/الاتجاه (الأكثر شيوعًا في الطباعة CNC والطباعة ثلاثية الأبعاد)
- تعديل عرض النبضة (PWM)
- التسلسلي (UART/I²C/SPI)
- التحكم التناظري
- CANopen أو EtherCAT للتطبيقات الصناعية
نوع السائق (المروحية مقابل محرك اليسار/اليمين)
| النوع | الوصف |
| محركات L/R | بسيطة، تستخدم المقاومات لتحديد التيار، أقل كفاءة |
| محركات الشفرة | تستخدم التبديل عالي التردد لتنظيم التيار بشكل ديناميكي، أكثر كفاءة |
أصبحت محركات المروحية الآن هي المعيار الصناعي بسبب أدائها وكفاءتها.
اختيار نوع السائق
فيما يلي تقنيات التشغيل الأكثر شيوعًا:
محركات المقاومة الخطية (L/R)
- بسيطة ومنخفضة التكلفة
- الأفضل للتطبيقات منخفضة السرعة ومنخفضة الأداء
- كفاءة محدودة
برامج تشغيل المروحية (التحكم في التيار PWM)
- استخدم تعديل عرض النبضة للتحكم في تيار الملف
- أكثر كفاءة
- السماح بالخطوات الدقيقة والتحكم الديناميكي في التيار
- أمثلة: A4988، DRV8825، TB6600
محركات متدرجة ذات حلقة مغلقة
- تضمين مشفر للملاحظات
- منع الخطوات الفائتة
- تقديم أداء يشبه أداء السيرفو
- تكلفة أعلى، تُستخدم في التطبيقات الصعبة
-
نوع السائق التكلفة التغذية الراجعة مناسب لـ سائق L/R منخفضة لا مشاريع DIY الأساسية أو التعليم سائق PWM متوسطة لا الطابعات ثلاثية الأبعاد، CNC، الأتمتة العامة حلقة مغلقة عالية نعم الروبوتات، الحركة الدقيقة، الأحمال الثقيلة
جدول اختيار محرك السائر
فيما يلي مخطط مرجعي سريع للمحركات المتدرجة الشائعة والمحركات المناسبة:
| نموذج المحرك | المقاس | الفولتية | التيار | نموذج السائق المناسب | خطوات صغيرة | ملاحظات |
| 42HS40 NEMA 17 | 17 | 12 فولت | 1.5A | A4988, DRV8825 | 1/16 | مناسب للطابعات ثلاثية الأبعاد |
| 57BYGH76 NEMA 23 | 23 | 24–48 فولت | 2.8A | TB6600, DM542 | 1/32 | جهاز التوجيه CNC، جهاز النقش بالليزر |
| 86BYG250 NEMA 34 | 34 | 48 فولت | 6.0A | DM860, Leadshine CL86T | حلقة مغلقة | التطبيقات الثقيلة |
ميزات إضافية للبحث عنها
عند اختيار برنامج التشغيل، يمكن للميزات التالية تعزيز الأداء والموثوقية:
الحماية من التيار الزائد ودرجة الحرارة الزائدة
يحمي المحرك والسائق من التلف الناتج عن التحميل الزائد أو ارتفاع درجة الحرارة.
الحد الحالي القابل للتعديل
يسمح بالضبط الدقيق لمطابقة مواصفات المحرك ومنع التسخين المفرط.
تقليل التيار الخامل
يقلل التيار عندما يكون المحرك خاملاً، مما يقلل من الحرارة واستهلاك الطاقة.
مشتت حراري مدمج أو مروحة
ضروري لمحركات التيار العالي للحفاظ على استقرار درجة الحرارة.
مطابقة السائق مع مصدر الطاقة
تأكد من أن مصدر الطاقة يلبي احتياجات الجهد والتيار لكليهما.
| سائق المحرك | جهد الإمداد الموصى به | ملاحظات |
| A4988 | 8–35 فولت | استخدم 12 فولت أو 24 فولت للحصول على أداء أفضل |
| DRV8825 | 8.2–45 فولت | مناسب للمحركات متوسطة الحجم |
| TB6600 | 9–42 فولت | استخدم 24 فولت أو أعلى للحصول على عزم دوران عند السرعة |
| DM542 | 18–50 فولت | عالي الجودة للصناعات، ممتاز للمحركات NEMA 23 |
- القاعدة العامة: التيار الإجمالي = 1.5x التيار المقدر للمحرك (للهامش)
أمثلة التطبيق
المثال 1: طابعة ثلاثية الأبعاد (NEMA 17 + A4988)
- عزم دوران منخفض ودقة عالية
- منخفضة التكلفة، محدودة المساحة
- السائق: A4988 أو DRV8825
- الطاقة: 12–24 فولت عند 2 أمبير
المثال 2: جهاز التوجيه CNC (NEMA 23 + TB6600)
- عزم دوران متوسط وحركة سريعة
- السائق: TB6600 أو DM542
- الطاقة: 24–48 فولت عند 4 أمبير
المثال 3: نظام الحزام الناقل (NEMA 34 + محرك الحلقة المغلقة)
- مطلوب عزم دوران عالي وردود فعل
- السائق: Leadshine CL86T
- الطاقة: 48 فولت عند 6-8 أمبير
الأخطاء الشائعة التي يجب تجنبها
- التيار السائق غير المقدر: يمكن أن يؤدي إلى تخطي الخطوات أو توقف الحركة.واجهة التحكم الخاطئة: تتسبب في فشل الاتصال مع متحكمك الدقيق أو PLC.
- سوء التبريد: يؤدي إلى ارتفاع درجة الحرارة وإيقاف تشغيل السائق.
- الحركة الضوضائية: تحدث بسبب عدم وجود خطوة دقيقة أو ضعف تردد PWM.
- الجهد الزائد: يؤدي إلى إتلاف عزل السائق أو المحرك.
اختيار المُشغِّل المناسب لا يقتصر على مطابقة المواصفات فحسب، بل يجب أن تفهم متطلبات تطبيقك، وخصائص المحرك، وأهداف الأداء. يضمن المُشغِّل المناسب تشغيلًا سلسًا وفعالًا وطويل الأمد للمُشغِّل.
سواء كنت تقوم ببناء طابعة ثلاثية الأبعاد للهواة أو نظام CNC صناعي، استخدم هذا الدليل لمقارنة خيارات برنامج التشغيل استنادًا إلى التيار والجهد وطريقة التحكم والخطوة الدقيقة وميزات الحماية.
هل ما زلت غير متأكد؟ بصفتنا موردًا محترفًا للمحركات والسائقات المتدرجة، نقدم الدعم الفني ونساعدك في اختيار السائق المناسب لاحتياجات تطبيقك. تواصل معنا في أي وقت!